该系列为DR_CAN自动控制原理视频笔记,详见https://space.bilibili.com/230105574
由于笔者水平有限,文中难免存在一些不足和错误之处,诚请各位批评指正。
1 换一种模式的体重模型
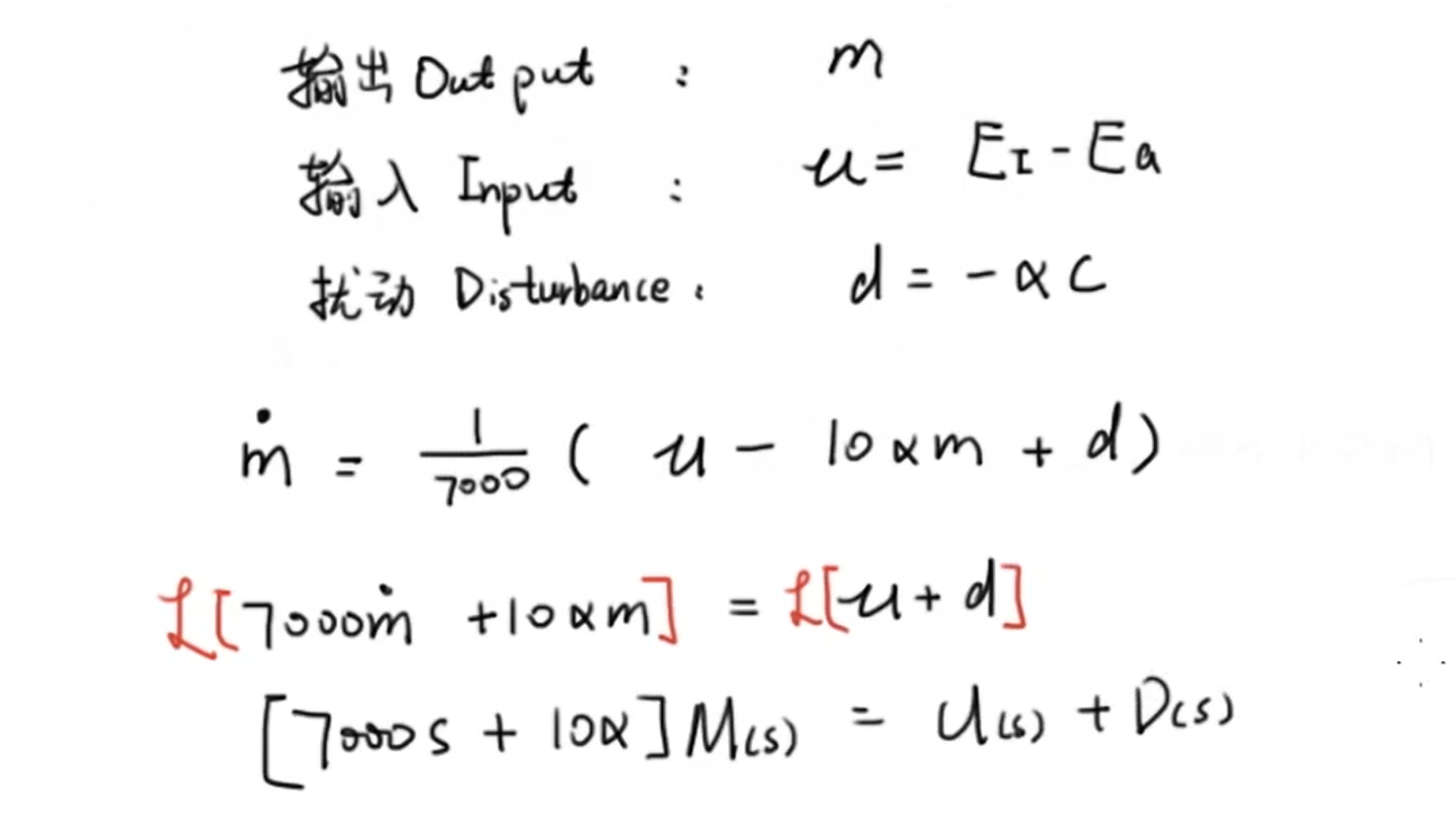
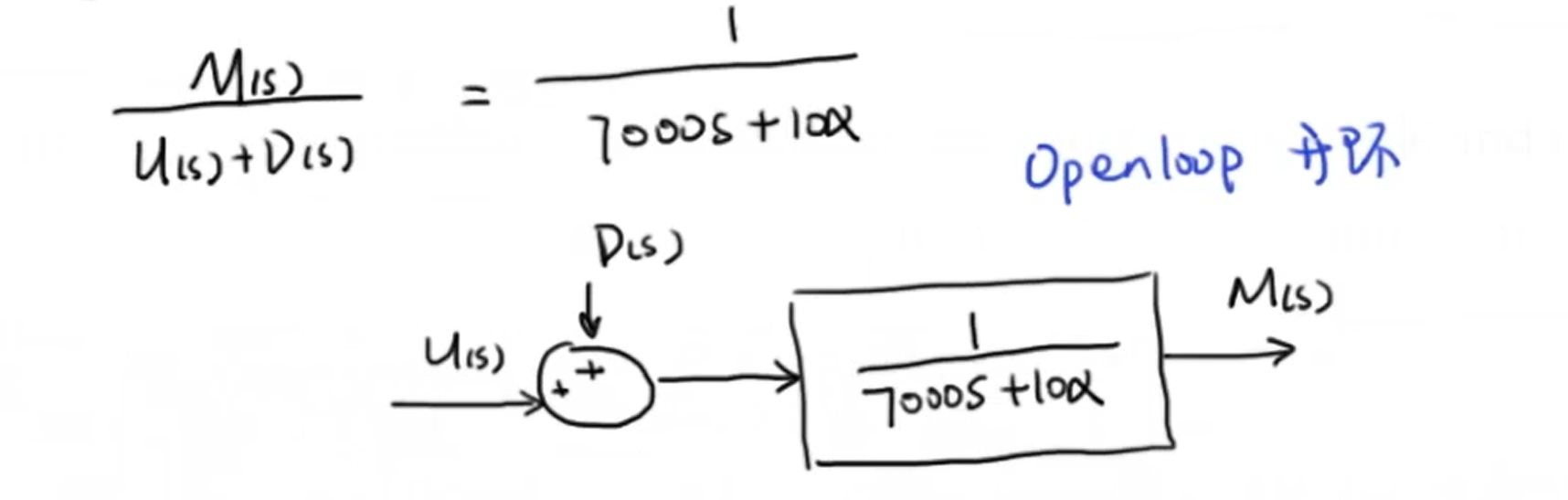
与上一个模型不同,这里我们的输入由 (E_i-E_a - ac) 变为 (E_i-E_a) ,并引入系统扰动这一概念,我们令系统扰动(disturbance) (d = -ac) 。通过调整系统输入我们得到了一个新的传递函数:
2 应用比例控制器
应用比例控制器这个东西都知道就不多说了:
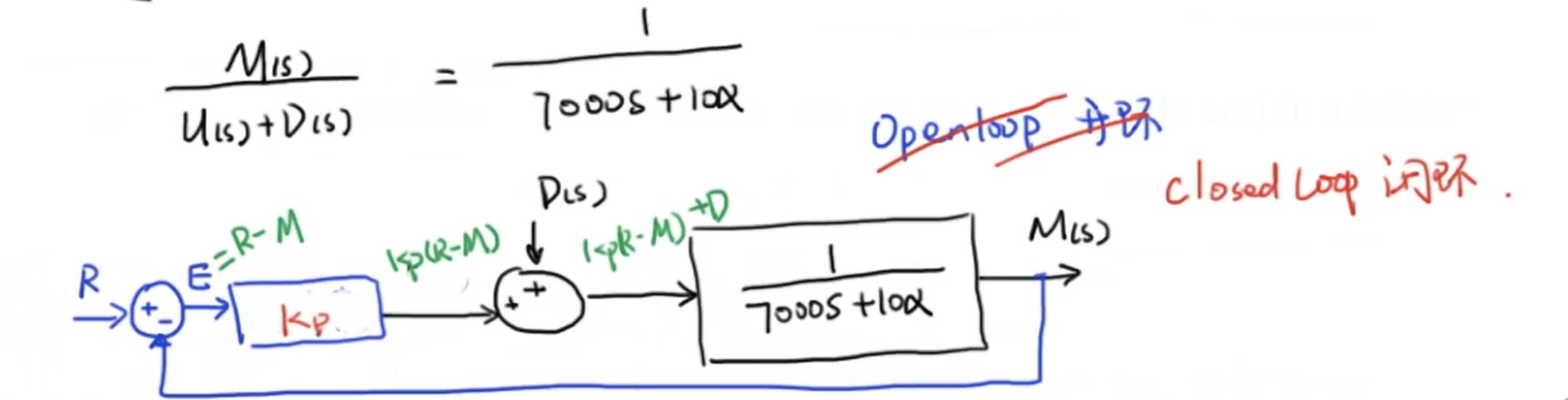
有了比例控制的环节,我们写出现在的闭环系统响应:

经过移项,把M都放到等式的一边:
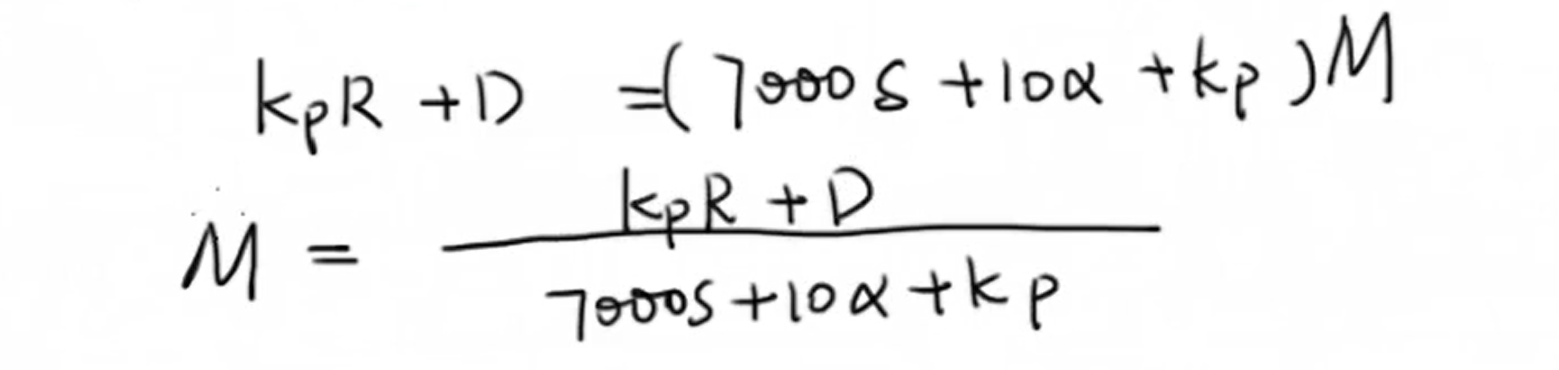
通过分析这个表达式的极点,我们就可以得到这个闭环系统的稳定性。有一个结论,就是如果R和D是稳定的,他们就不会对M的稳定性产生影响,通过将这个等式中的D和R进行拉普拉斯变换,可以得到:
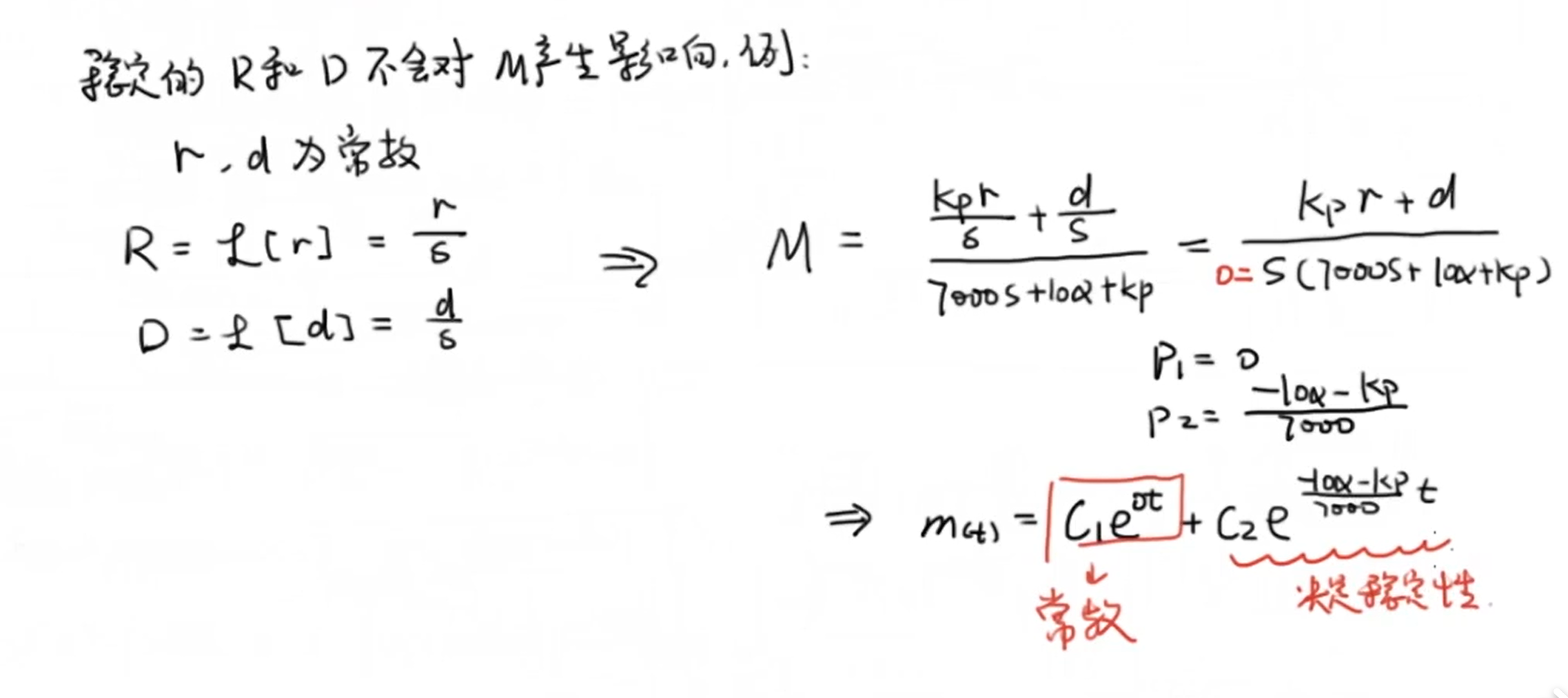
其实比例控制器给闭环系统输出响应带来了一个极点 (s = 0) ,这个极点时域情况下为一个常数,并不影响变化趋势也就是稳定性。我们关注另一个极点,不难发现,当 (K_p > -10alpha) 时极点位于虚轴左侧。
3 在Simulink中搭建与分析
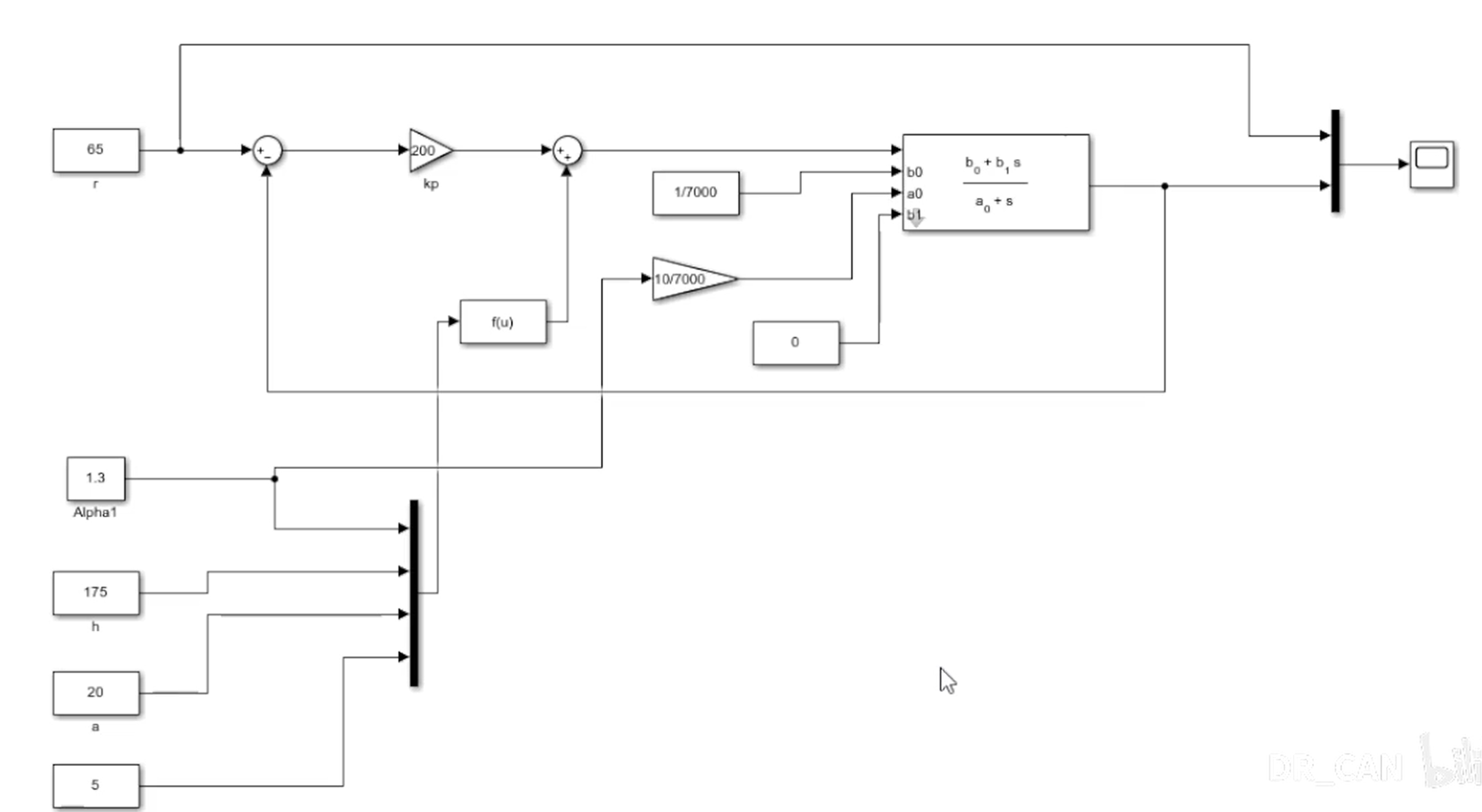
经过运行我们发现Kp在200的情况下系统可以收敛,但却很难收敛到期望值,期望值和收敛值之间会存在稳态误差(Steady State Error):
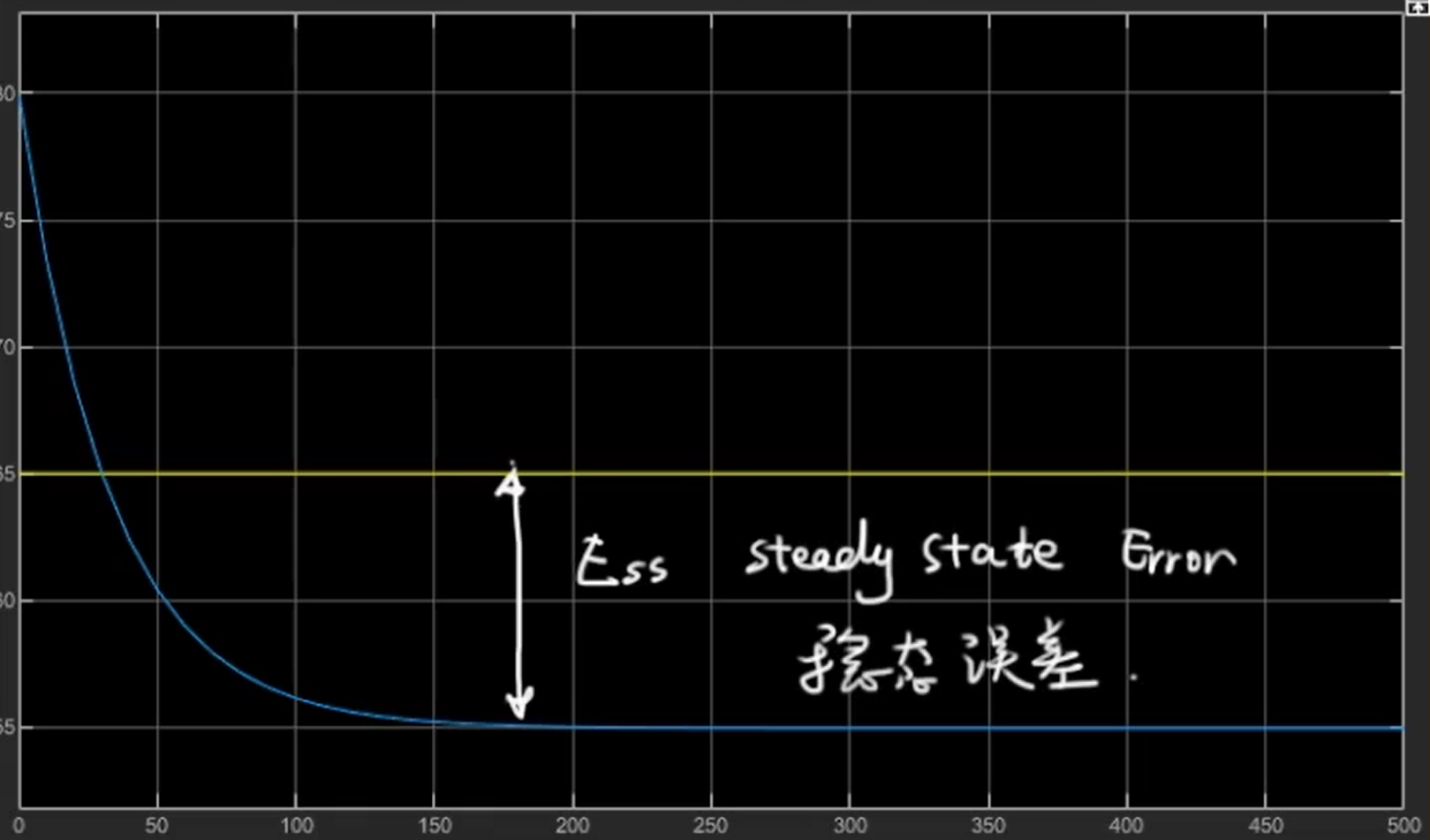
这个稳态误差是由系统的特性引起的,在下一篇中会详细分析稳态误差的产生以及消除方法。