本系列旨在以我自己写的PID lib为例,讲一下PID的几点基本优化,PID的基本原理网上有很多资料,因此本系列将不会涉及PID的基本实现原理,在这里特别推荐Matlab tech talk的PID教程:https://ww2.mathworks.cn/videos/series/understanding-pid-control.html。
由于笔者大一在读,还没有学习自动控制原理等课程,因此本系列将不会从自控原理角度展开,相反的,本系列将试图从“直觉”展开,通过直观的描述让大家从直觉上感受并理解PID的一些包括微分先行、积分分离等基础的优化。
由于笔者水平有限,文中难免存在一些不足和错误之处,诚请各位批评指正。
我的PID库与PID基本优化(一)中讲解了代码结构与代码使用,算法有关内容于该篇开始
1 梯形积分
1.1 问题
积分项的作用在绝大多数情况下是消除静差,为了更精准的消除静差,我们需要提高积分项的计算精度。在一般的PID算法中,我们通过矩形面积来近似计算积分,在微积分中我们了解到,当 (Delta t) 趋近于无穷小时,这些矩形面积的累加就会无限逼近曲线与坐标轴围成的面积。
1.2 解决方案
为了达到更精准的控制,我们一般可以通过提高控制频率来实现,但在某些情况下受制于控制设备算力,我们无法以很高的频率来运行我们的算法。因此我们可以用梯形代替矩形,以此获得更高的积分精度,这种方式在控制频率越低的场合提高精度的效果越好。
1.3 代码实现
static void f_Trapezoid_Intergral(PID_TypeDef *pid)
{
pid->ITerm = pid->Ki * ((pid->Err + pid->Last_Err) / 2);
}
2 微分先行
2.1 问题
在常规PID中,微分项是微分系数乘误差的微分,而误差的微分又可以化成目标信号的微分减去输入(测量值)的微分,即:
当目标信号瞬间发生变化时,其微分会变得非常非常大,这会导致微分项的值也在瞬间变得巨大。这样异常的微分项添加至控制算法中,会导致PID的输出出现我们不希望看到的峰值,这样的峰值可能会影响系统的稳定性,甚至对执行器或者系统其他部分造成损坏,我们称这种现象为微分冲击(Derivative Kick)。
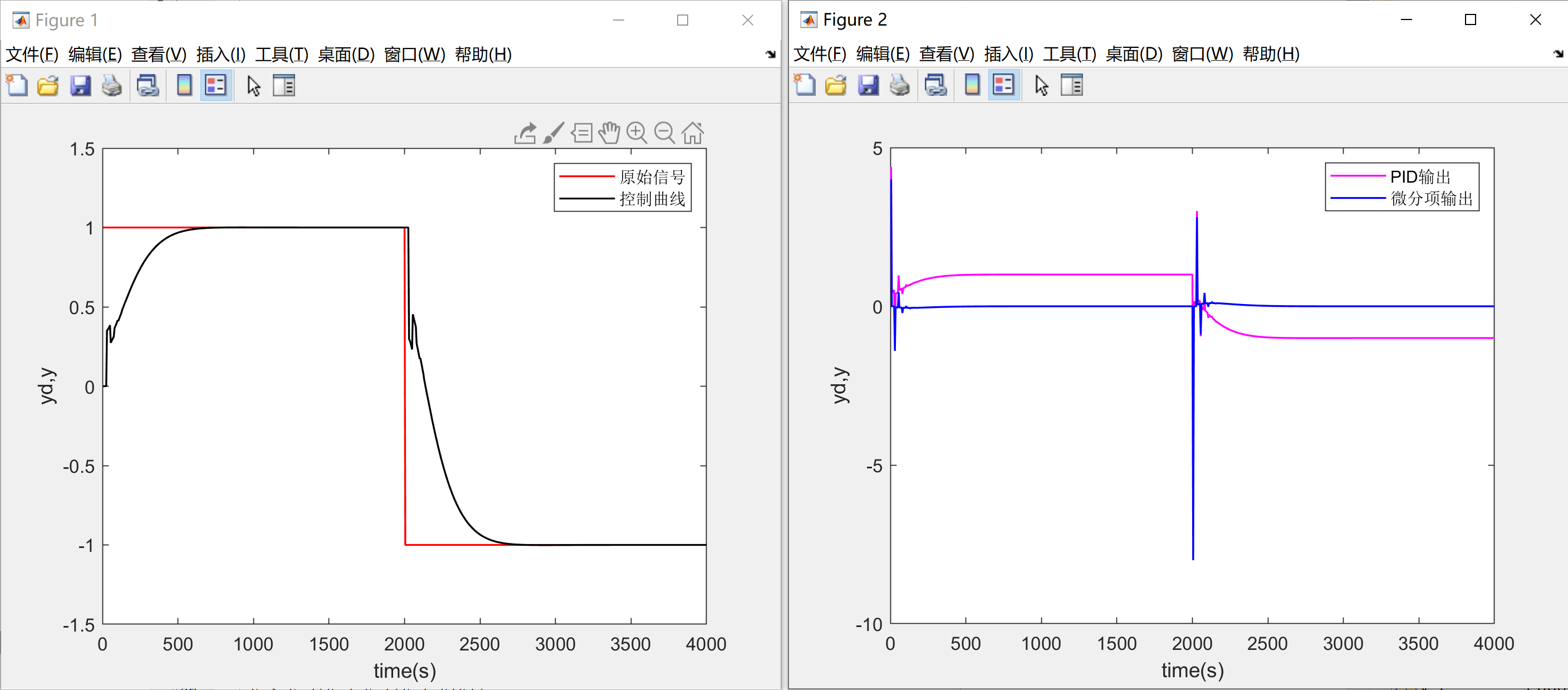
如下图所示,微分冲击会使被控对象发生瞬间的抖动,通过观察PID输出与微分项输出,我们可以直观感受到微分冲击的威力:
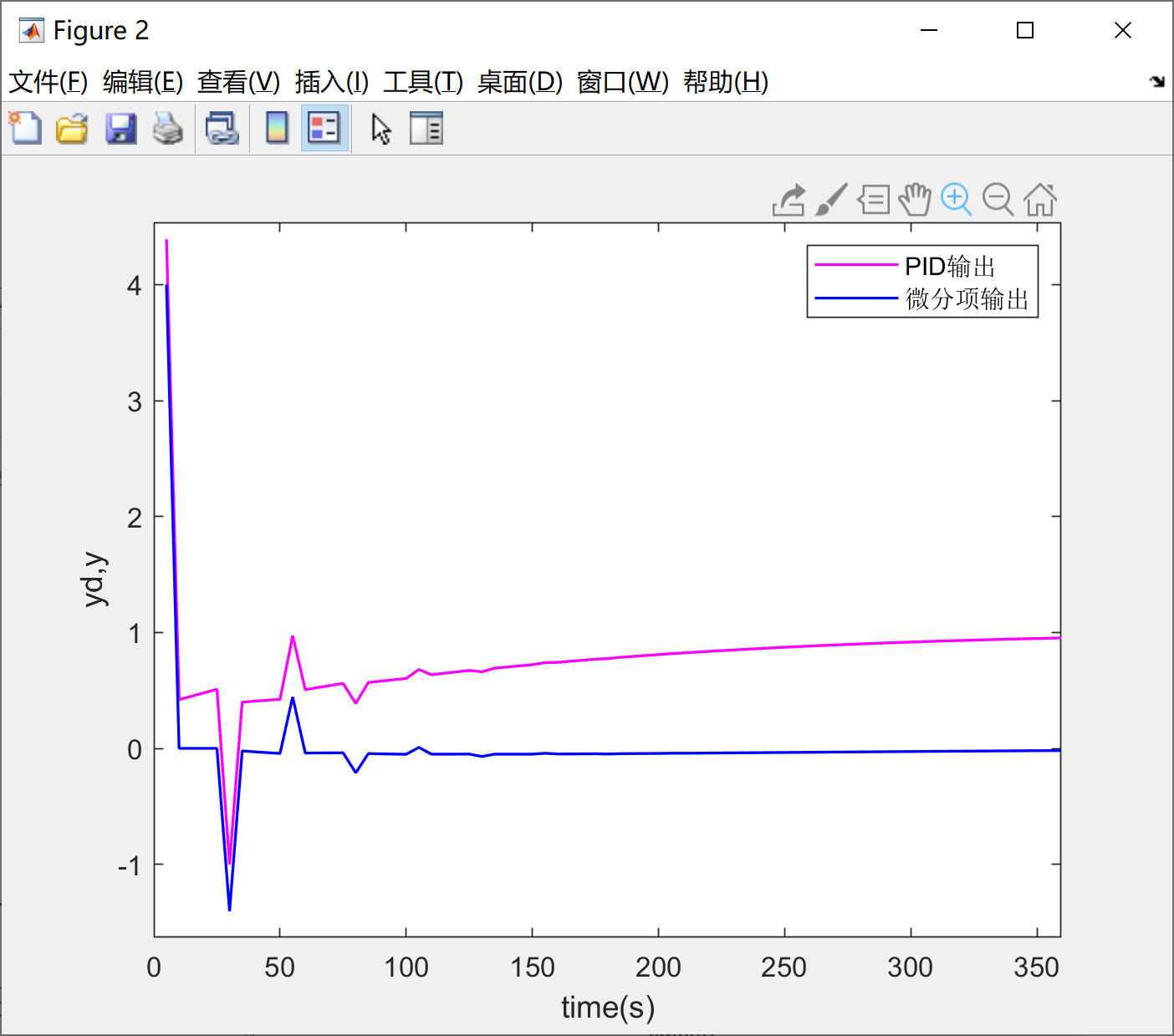
将图像2放大来看,在阶跃信号刚产生时,微分项会给整个输出带来巨大的尖峰:
2.2 解决方案
通过公式我们可以看到,是目标信号的微分引入的异常数值,因此我们只需要扔掉目标信号的微分,只保留输入(测量值)的微分(注意不要漏掉符号):
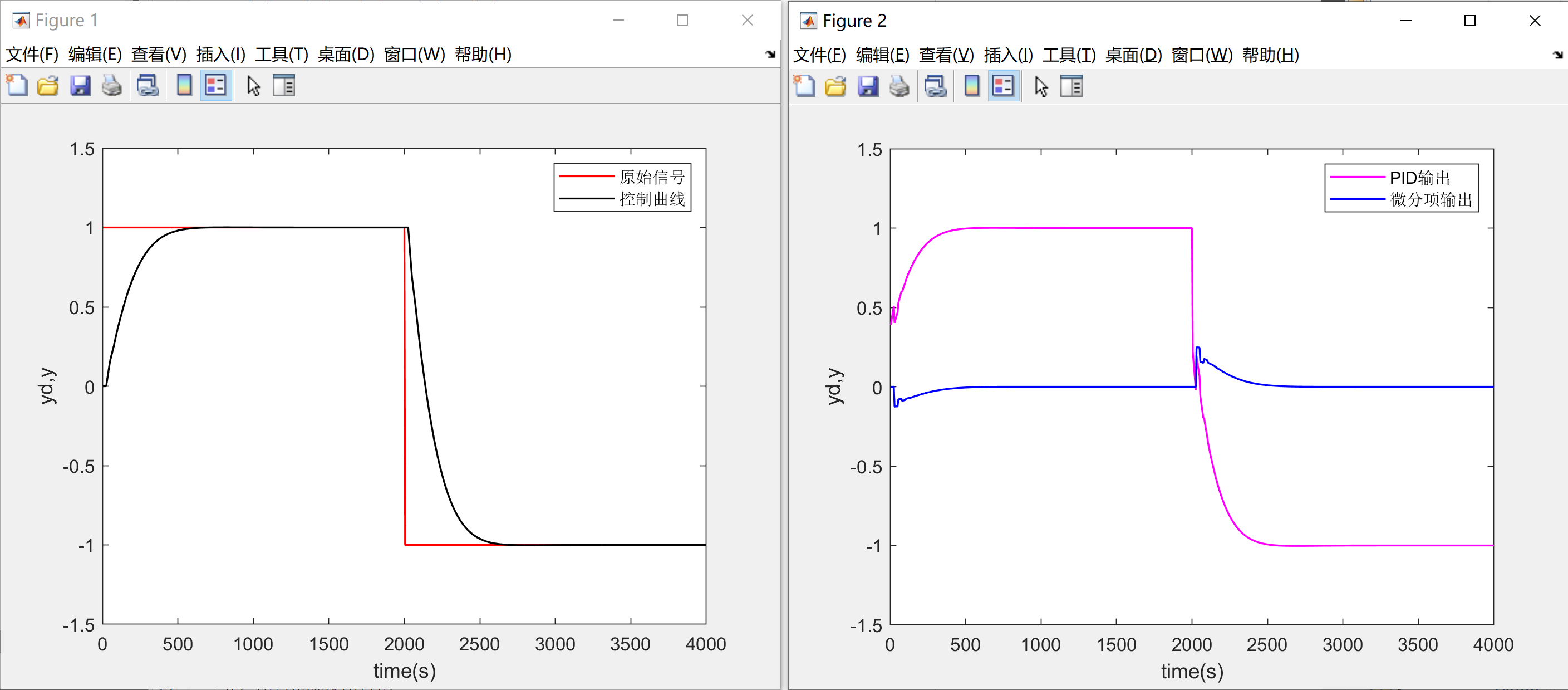
经过对微分项的一点点调整,我们可以看到,现在的控制曲线变得更加平滑,PID的输出也不会出现异常的峰值:
2.3 代码实现
static void f_Derivative_On_Measurement(PID_TypeDef *pid)
{
pid->Dout = pid->Kd * (pid->Last_Measure - pid->Measure);
}