简单的小工具是VS2015 + Qt5.6.1实现的,界面部分是Qt实现,串口是封装的WinAPI,把串口收发模块封装成了个Serialport.dll 供Qt界面调用。
由于VS2015需要Universal CRT运行环境,因此把Qt编译成了静态的版本。
一、串口收发是封装的Win32,单独封装成了一个Serialport.dll.
包括串口通信类:
class CSerialport
{
public:
CSerialport();
~CSerialport();
BOOL openComm(const string & name);
BOOL closeComm();
BOOL setCommState(const DCB & dcb)const;
BOOL getCommState(DCB & dcb)const;
BOOL setCommTimeouts(const COMMTIMEOUTS & commtimeOuts)const;
BOOL purgeComm(DWORD flags = PURGE_RXCLEAR | PURGE_TXCLEAR | PURGE_RXABORT | PURGE_TXABORT)const;
BOOL setupComm(DWORD dwInQueue, DWORD dwOutQueue)const;
int readFile(vector<char> & buffer, DWORD nNumberOfBytesToRead,DWORD & lpNumberOfBytesRead, LPOVERLAPPED pLoverlapped = NULL);
int writeFile(vector<char> & buffer, DWORD nNumberOfBytesToRead, DWORD & lpNumberOfBytesRead, LPOVERLAPPED pLoverlapped = NULL);
string getPortName()const;
HANDLE getHandle()const;
//
private:
HANDLE m_hspCom;
string m_commName;
};
此类负责基本的串口通信。
线程类:
1 class CBaseThread
2 {
3 public:
4 CBaseThread(void);
5 virtual ~CBaseThread(void);
6 public:
7 virtual void start(); //创建线程
8 virtual void end(); //结束线程
9 virtual void resume(); //重启线程
10 virtual void suspend(); //暂停线程
11 //
12 virtual int getThreadID() const; //获得线程ID
13 virtual BOOL isRun() const; //判断线程是否运行
14 virtual void runTask() = 0; //子类实现此函数完成业务逻辑
15 //
16 static unsigned _stdcall threadFunc(void* pParam); //线程函数,调RunTask逻辑
17
18 protected:
19 HANDLE m_hEndEvent; //设置退出线程处理
20 HANDLE m_hExitEvent; //线程RunTask结束时设置,确保线程正常退出
21 HANDLE m_hThreadHandle;
22 unsigned int m_uThreadID;
23 //
24 };
线程基类,封装了_beginthreadex()。
串口线程调度线程:
typedef int (*pGET_DATA_CAAL_BACK)(list<char> &);
class CSerialportThread :
public CBaseThread
{
public:
CSerialportThread(void);
virtual ~CSerialportThread(void);
void setCommConfig(const char* com, int baudRate, char byteSize, char parity, char stopBits);
static CSerialportThread * getInstance();
int writeFile(const char * writeBuffer,int size);
void initCallBack(void *);
protected:
virtual void runTask();
void initComm();
protected:
CSerialport m_serialport;
//
string m_com;
int m_baudRate;
char m_byteSize;
char m_parity;
char m_stopBits;
bool m_bInit;
pGET_DATA_CAAL_BACK m_addDataCallBack;
};
继承CBaseThread实现runTask()线程函数,由CSerialport 类成员变量进行串口的通信的管理,并提供一个回调接口,将接收到的数据回调给接收数据维护的类。
串口数据接收维护类:
class CCommDataHolder
{
public:
CCommDataHolder();
~CCommDataHolder();
//
static std::shared_ptr<CCommDataHolder> getInstance();
static int getDataCallBackS(list<char> & buffer);
int getCommData(char * buffer,int len);
protected:
int getDataCallBack(list<char> & buffer);
//
private:
static std::shared_ptr<CCommDataHolder> s_pInstance;
static std::mutex s_mt;
//
list<char> m_listData;
std::mutex m_mt;
};
数据维护类,上层应用来这里取数据即可。
Serialport.dll导出接口:
1 #pragma once
2
3 #define SERIALPORT_DLL_EXPORT __declspec(dllexport)
4
5 #ifdef __cplusplus
6 extern "C"
7 {
8 #endif //
9
10 SERIALPORT_DLL_EXPORT int commReadData(char* buffer,int size);
11 SERIALPORT_DLL_EXPORT int commWriteData(const char* buffer, int size);
12 SERIALPORT_DLL_EXPORT void setCommConfig(const char* com,int baudRate,char byteSize,char parity,char stopBits);
13 SERIALPORT_DLL_EXPORT void start();
14 SERIALPORT_DLL_EXPORT void end();
15
16 #ifdef __cplusplus
17 }
18 #endif //
二、Qt界面实现
界面实现主要是设置串口的通信的参数,然后设置串口通信的收发区域,这里使用textEdit控件,然后设置了一下数据的展现方式,分ASCII和HEX(16进制发送),
16进制发送的形式应该为: 61 25 AA 7A 5B的这种形式,然后选择Hex选项,发送。
串口列表:自动枚举系统的所有已存在串口enumPort(QStringList & strList)
1 void SerialPortTools::enumPort(QStringList & strList)
2 {
3 HKEY hKey;
4 LPCTSTR lpSubKey = _T("HARDWARE\DEVICEMAP\SERIALCOMM\");
5
6 if (RegOpenKeyEx(HKEY_LOCAL_MACHINE, lpSubKey, 0, KEY_READ, &hKey) != ERROR_SUCCESS)
7 {
8 return;
9 }
10 WCHAR szValueName[100] = { 0 };
11 WCHAR szPortName[100] = { 0 };
12 LONG status;
13 DWORD dwIndex = 0;
14 DWORD dwSizeValueName = 100;
15 DWORD dwSizeofPortName = 100;
16 DWORD Type;
17 dwSizeValueName = 100;
18 dwSizeofPortName = 100;
19 do
20 {
21 status = RegEnumValue(hKey, dwIndex++, szValueName, &dwSizeValueName, NULL, &Type, (PUCHAR)szPortName, &dwSizeofPortName);
22 if ((status == ERROR_SUCCESS))
23 {
24 QString tmp = CCodecUtils::str2qstr(CEcoder::wstringToString(szPortName));
25 strList << tmp;
26 }
27 dwSizeValueName = 100;
28 dwSizeofPortName = 100;
29 } while ((status != ERROR_NO_MORE_ITEMS));
30 RegCloseKey(hKey);
31 }
设置好串口参数,串口号,波特率,数据位,校验位,停止位等参数后setCommConfig(com.c_str(), baudRate, byteSize, parity, stopBit);
,打开串口start();开启调度串口通信线程。
打开串口需要引用Serialport.dll的接口函数
1 void SerialPortTools::openPort()
2 {
3 QString strCom = ui.comboBox->currentText();
4 QString strBaudRate = ui.comboBox_2->currentText();
5 QString strByteSize = ui.comboBox_3->currentText();
6 //
7 string com = CCodecUtils::qstr2str(strCom);
8 int baudRate = strBaudRate.toInt();
9 int byteSize = strByteSize.toInt();
10 int parity = ui.comboBox_4->currentIndex();
11 int stopBit = ui.comboBox_5->currentIndex();
12 setCommConfig(com.c_str(), baudRate, byteSize, parity, stopBit);
13 //
14 start();
15 m_timer.start();
16 MessageBoxInfo(tr("提示"), tr(" 串口打开成功 "));
17 ui.openaction->setEnabled(false);
18 ui.closeaction->setEnabled(true);
19 }
数据接收的实现是设置了一个定时器,不断去调用commReadData(char* buffer,int size) 去读取dll数据缓存区的数据,读到之后更新到数据接收区的界面。
发送则很简单,获取数据发送区的内容,点击发送,直接调用commWriteData(const char *buffer,int size)发送串口数据。
定时器:
1 m_timer.setInterval(2000);
2 connect(&m_timer, SIGNAL(timeout()), this, SLOT(reciveData()));
数据收:
1 void SerialPortTools::reciveData()
2 {
3 char szRead[1024] = { 0 };
4 memset(&szRead, 0, 1024);
5 int nRet = commReadData(szRead, 1024);
6 m_strRec = CCodecUtils::qstr2str(ui.textEdit->toPlainText());
7 if (nRet != 0)
8 {
9 string str = szRead;
10 m_strRec += str;
11 if (ui.radioButton->isChecked())
12 {
13 ui.textEdit->setText(CCodecUtils::str2qstr(m_strRec));
14 }
15 else if (ui.radioButton_2->isChecked())
16 {
17 char sz[2048];
18 memset(&sz, 0, 2048);
19 ui.textEdit->setText(CCodecUtils::str2qstr(CCodecUtils::byte2HexCpp(m_strRec)));
20 }
21 }
22 }
数据发:
1 void SerialPortTools::sendData()
2 {
3 QString str = ui.textEdit_2->toPlainText();
4 string strSend = CCodecUtils::qstr2str(str);
5 if (!strSend.empty())
6 {
7 //
8 if (ui.radioButton_3->isChecked())
9 {
10 commWriteData(strSend.c_str(), strSend.length() + 1);
11 }
12 else if (ui.radioButton_4->isChecked())
13 {
14 string strtmp = CCodecUtils::hexStr2Str(CCodecUtils::eraseSpace(strSend));
15 commWriteData(strtmp.c_str(),strtmp.length()+1);
16 //
17 }
18 }
19 }
串口关闭end();
1 void SerialPortTools::closePort()
2 {
3 end();
4 ui.openaction->setEnabled(true);
5 ui.closeaction->setEnabled(false);
6 }
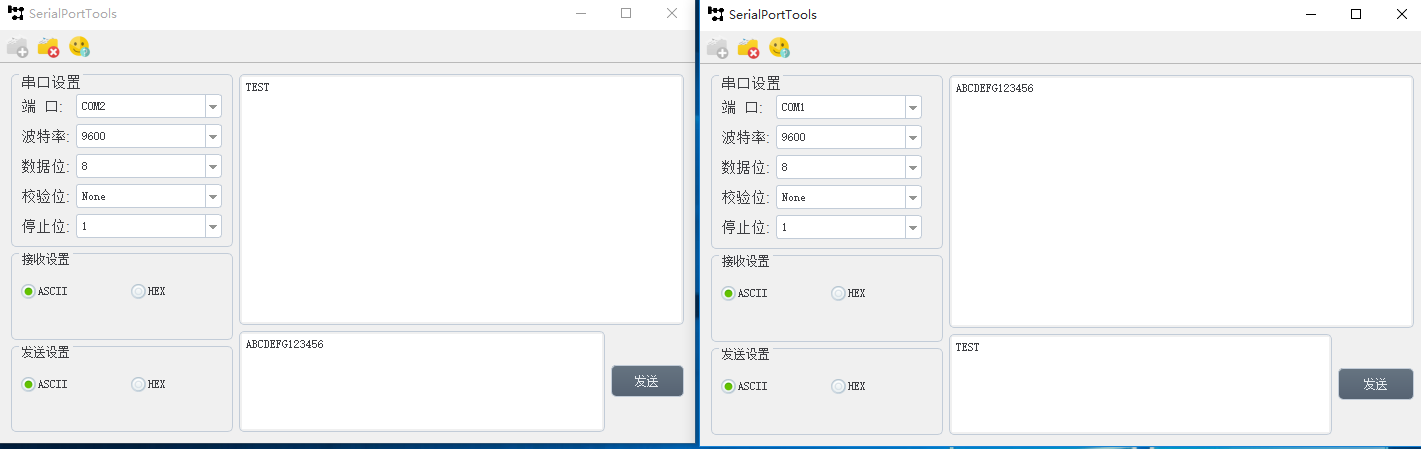
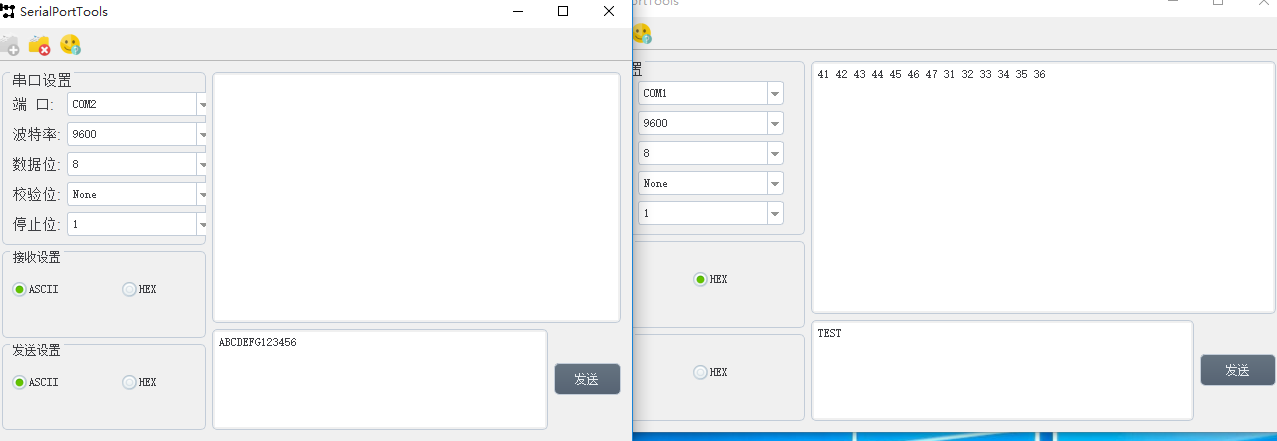
软件运行:
用虚拟串口工具打开COM1和COM2两个串口对,打开两次SerialPortTools.exe ,分别打开COM1和COM2,进行简单的数据通信测试。
源码地址:https://github.com/karllen/SerialPortTools