一.改变图片每个像素点每个通道的灰度值
(一)
代码如下:
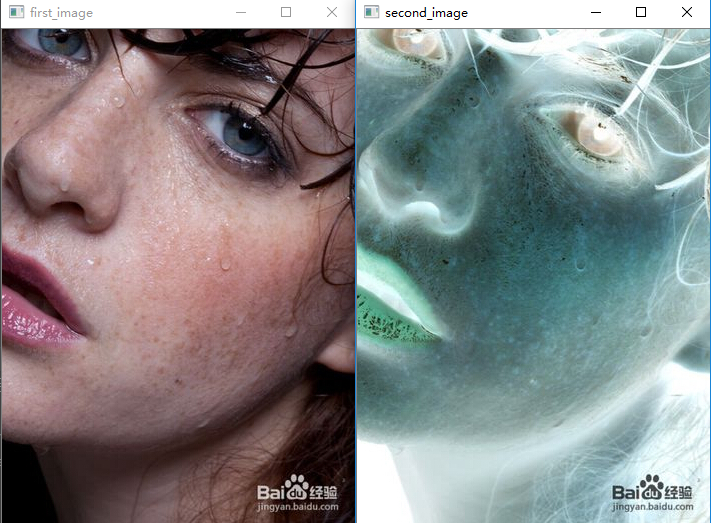
#遍历访问图片每个像素点,并修改相应的RGB import cv2 as cv def access_pixels(image): print(image.shape) height = image.shape[0] width = image.shape[1] channels = image.shape[2] print(" %s height: %s channels: %s"%(width, height, channels)) for row in range(height): for col in range(width): for c in range(channels): pv = image[row , col, c] #获取每个像素点的每个通道的数值 image[row, col, c]=255 - pv #灰度值是0-255 这里是修改每个像素点每个通道灰度值 cv.imshow("second_image",image) src=cv.imread('E:imageloadexample.png') #blue, green, red cv.namedWindow('first_image', cv.WINDOW_AUTOSIZE) cv.imshow('first_image', src) t1 = cv.getTickCount() #GetTickcount函数返回从操作系统启动到当前所经过的毫秒数 access_pixels(src) t2 = cv.getTickCount() time = (t2-t1)/cv.getTickFrequency() #getTickFrequency函数返回CPU的频率,就是每秒的计时周期数 print("time : %s ms"%(time*1000) ) #输出运行时间 cv.waitKey(0) cv.destroyAllWindows()
运行结果:

注意:
1.image[i,j,c] i表示图片的行数,j表示图片的列数,c表示图片的通道数(0代表B,1代表G,2代表R 一共是RGB三通道)。坐标是从左上角开始
2.每个通道对应一个灰度值。灰度值概念:把白色与黑色之间按对数关系分成若干级,称为“灰度等级”。范围一般从0到255,白色为255,黑色为0。要详细了解灰度值和通道的概念,请参考这篇博客:https://blog.csdn.net/silence2015/article/details/53789748
(二)
上述代码实现像素取反的运行时间较长,下面代码运用opencv自带的库函数可以使运行时间大大减少。
代码如下:
#调用opencv的库函数快速实现像素取反 import cv2 as cv def inverse(img): img = cv.bitwise_not(img) #函数cv.bitwise_not可以实现像素点各通道值取反 cv.imshow("second_image", img) src=cv.imread('E:imageloadexample.png') #blue, green, red cv.namedWindow('first_image', cv.WINDOW_AUTOSIZE) cv.imshow('first_image', src) t1 = cv.getTickCount() #GetTickcount函数返回从操作系统启动到当前所经过的毫秒数 inverse(src) t2 = cv.getTickCount() time = (t2-t1)/cv.getTickFrequency() #getTickFrequency函数返回CPU的频率,就是每秒的计时周期数 print("time : %s ms"%(time*1000) ) #输出运行时间 cv.waitKey(0) cv.destroyAllWindows()
运行结果:
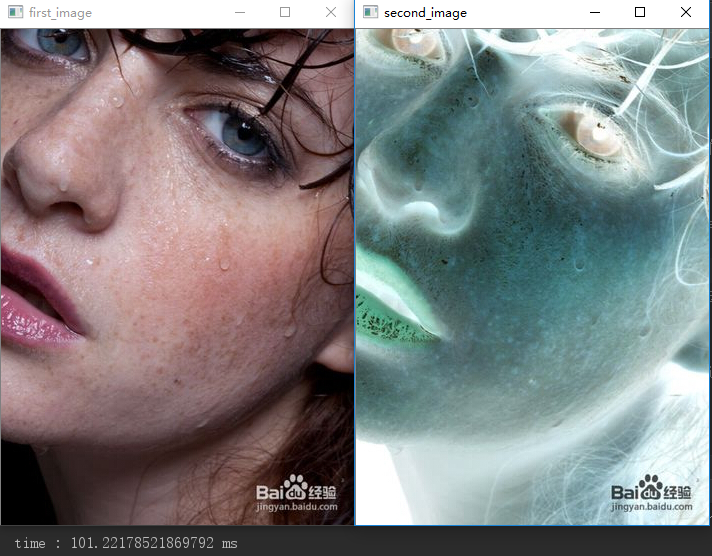
可见,使用库函数 bitwise_not 可以使运行时间缩短13倍左右
二.自定义一张三通道图片
代码如下:
#自定义一张三通道图片 import cv2 as cv import numpy as np def creat_image(): img = np.zeros([400, 400, 3], np.uint8) #将所有像素点的各通道数值赋0 img[:, :, 0] = np.ones([400, 400]) * 255 #0通道代表B # img[:, :, 1] = np.ones([400, 400]) * 255 #1通道代表G # img[:, :, 2] = np.ones([400, 400]) * 255 #2通道代表R cv.imshow("new_image",img) creat_image() cv.waitKey(0) cv.destroyAllWindows()
运行结果:
注意:
1.np.zeros函数用于创建一个数值全为0的矩阵,np.ones用于创建一个数值全为1的矩阵
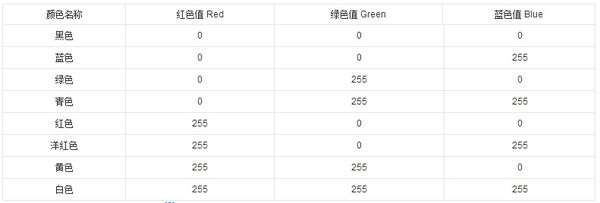
2.当图片为多通道图片时,B:255 G:0 R:0 则三通道图片显示蓝色。所有通道数值组合示意图如下:
补注:
单通道: 此通道上值为0-255。 (255为白色,0是黑色) 只能表示灰度,不能表示彩色。
三通道:BGR (255,255,255为白色, 0,0,0是黑色 ) 可以表示彩色, 灰度也是彩色的一种。
单通道和三通道区别见博客:https://blog.csdn.net/qq_32211827/article/details/56854985
三、自定义一张单通道图片
代码如下:
#自定义一张单通道图片 import cv2 as cv import numpy as np def creat_image(): img = np.ones([400, 400, 1], np.uint8) #该像素点只有一个通道,该函数使所有像素点的通道的灰度值为1 img = img * 127 #使每个像素点单通道的灰度值变为127 cv.imshow("new_image",img) creat_image() cv.waitKey(0) cv.destroyAllWindows()
运行结果:
注意:
1.代码里 img = img * 127 表示数组里的每个数值都乘以127
2.之所以np.ones函数参数类型是uint8,是因为uint8数的范围为0~255, 那么为0时恰好为黑色,为255时恰好为白色。若函数参数类型为int8,则int8类型数的范围为-128~127,那么-128则为黑色,127为白色