空间三维坐标转换原理及实现
本文详细介绍了不同空间三维坐标系之间坐标转换的两种数学模型,即线性模型和非线性模型,并对两种模型进行比较。为实现三维坐标系之间的相互转换,基于线性模型,编制了相关的可视化程序
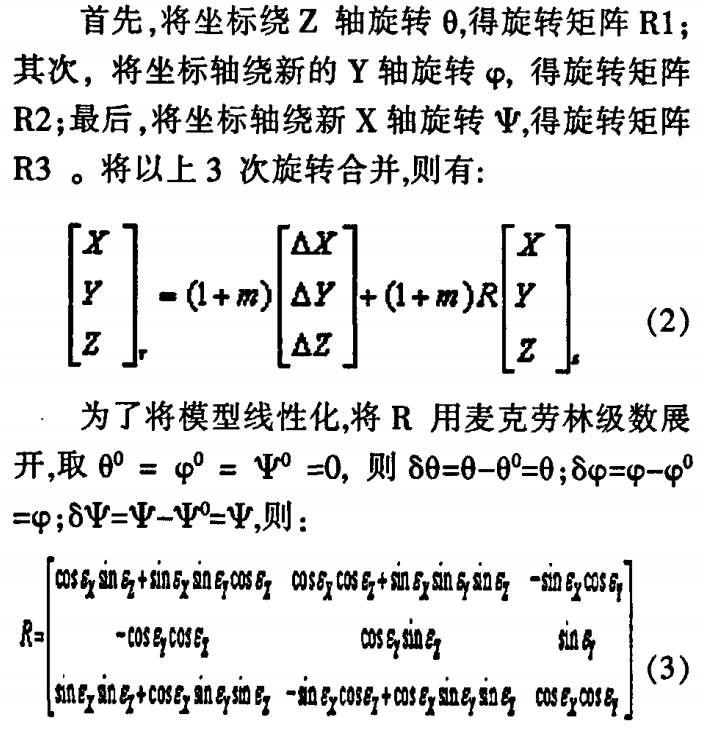
旋转矩阵分别为


线性转换模型

非线性转换模型
非线性平差模型为:L=B(x)+△ (6)
E(△)=O



注:线性非线性感觉在于考虑平差模型问题。
三维坐标转换的非线性模型
讨论了三维坐标转换的线性模型的应用范围,提出了三维坐标转换的非线性模型,解决了线性模型对旋转角大小的限制。(本文和上文内容非常类似)
1)当旋转角较大时, 三维坐标转换的线性模型存在大的模型误差,无法适用。 因此,应研究线性转换模型对旋转角大小的限制。 本文以长距离转换点为例进行了说明。
2)本文给出的三维坐标非线性转换模型是将非线性模型线性化产生的误差作为函数模型的模型误差处理,算法简单而有效。
3)由表 和表 可看出,采用传统线性模型进行三维坐标转换时,要求旋转角为微小角 ( 秒级),而采用本文所提出的非线性模型,只要求 3个旋转角均在50度内,算法收敛,即可求解。 当点的平均距离小于 2000km 时,迭代次数不超过101次。
罗 德 里 格 矩 阵在共线方程严密解法中的应用
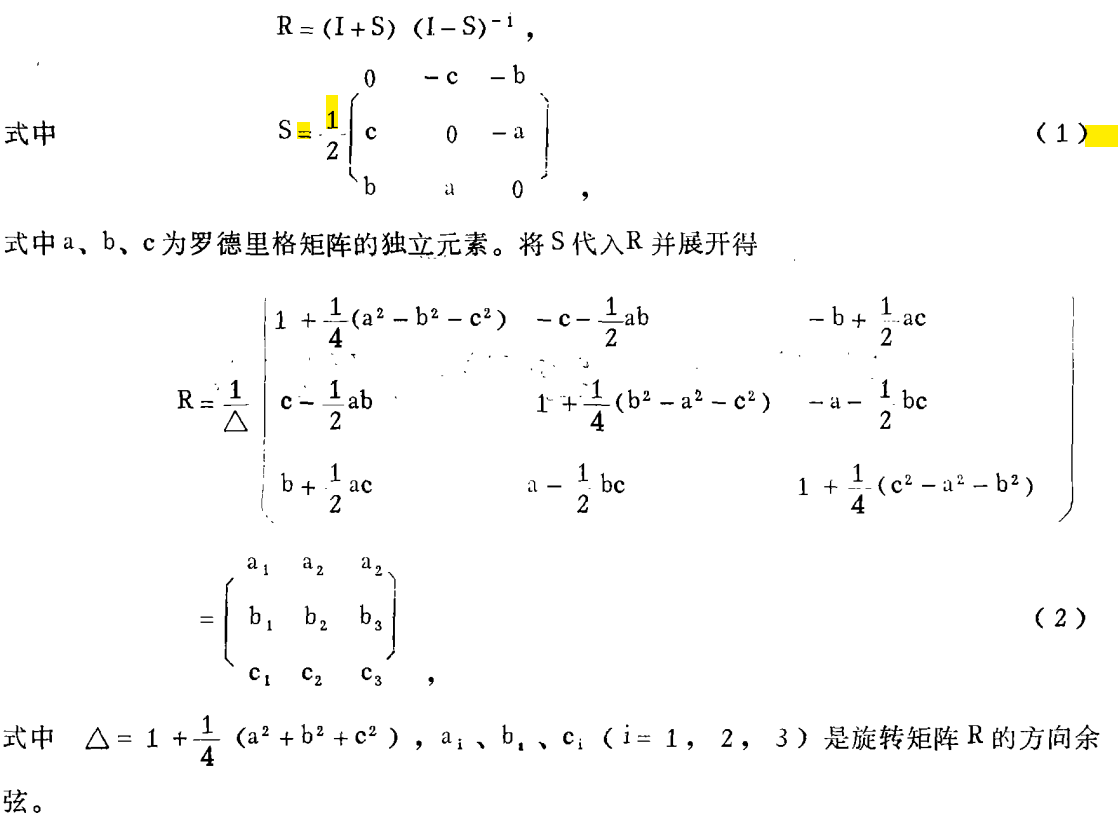
本 文 以罗德里格矩阵 的独 立元素 b 、 a、 c 取代方位角 元素 φ,ψ,ω 作为共线方程中 的未知 数 , 并推 导了在 这种 前提下误差 方程组成的严 密公式 ( 以下简 称为独立元 素法 ) 。
罗德 里 格矩阵 是指 由实反 对称矩阵 S 组成的旋 转矩 阵

一种多站标靶点云整体配准算法
该方法使用三维激光扫描仪和卷尺同时完成点云数据的采集和控制测量外业工作, 并将经典测边网平差理论引入到多站标靶点云配准领域, 给出了相应误差方程的构建方法。







嵌套论文《罗德里格矩阵在三维坐标转换严密解算中的应用》
利用反对称矩阵和罗德里格矩阵的性质, 把传统的三个旋转角参数用反对称矩阵的三个独立元素代替, 推导了用三个公共点计算任意旋转角情况下的 7 个参数的直接计算公式, 并建立了相应的平差模型。






罗德里格公式(维基百科,自由的百科全书)
关于几何学中关于向量的旋转的演算法(Rodrigues' rotation formula),详见“罗德里格旋转公式”。
罗德里格公式(英语:Rodrigues' formula)是通过对某些函数进行反复的求导以获得一个表达式序列的公式。该公式典型的应用是在正交多项式的推导中,如对于某两个函数W、Q和常数an,能得到以下正交多项式序列:
此公式由法国数学家欧林·罗德里格最早得出。