1. 旋转的几种表达方式
向量
- 关于向量:
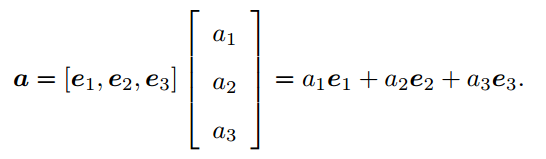
注:其中e1,e2,e3为线性空间下的一组基。
- 向量的内积:

注:向量的内积表示向量间的投影关系。
- 向量的外积

注:可以使用外积表示向量的旋转。
注:^ 记成一个反对称符号。
1.1 旋转矩阵
假设某个单位正交基(e1; e2; e3) ,经过一次欧式变换,变成了(e′ 1; e′ 2; e′ 3),对于同一个向量 a (注意该向量并没有随着坐标系的旋转而发生运动),它在两个坐标系下的坐标为 [a1; a2; a3]T 和 [a′ 1; a′ 2; a′ 3]T:
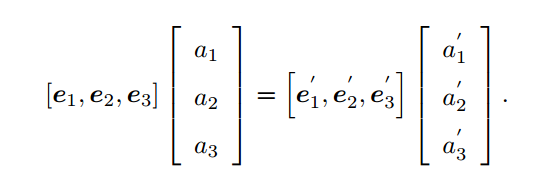
整理可得:
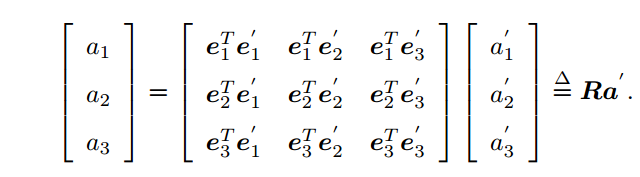
注:旋转矩阵R是一个行列式为 1 的正交矩阵。反之,行列式为 1 的正交矩阵也是一个旋转矩阵。
- 特殊正交群

注:SO(n) 是特殊正交群( Special Orthogonal Group)的意思。

注:RT 刻画了一个相反的旋转。
变换矩阵和齐次坐标
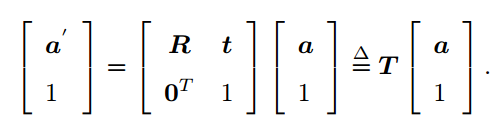
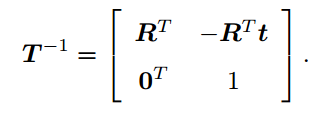
- 特殊欧式群

注:变换矩阵T的逆表示反向的变换
1.2 旋转向量
- SO(3) 的旋转矩阵有九个量,但一次旋转只有三个自由度。因此这种表达方式是冗余的。
- 旋转矩阵自身带有约束:它必须是个正交矩阵,且行列式为 1。这些约束会使得优化求解变得更困难。
任意旋转都可以用一个旋转轴和一个旋转角来刻画。假设有一个旋转轴为 n,角度为 θ 的旋转,显然,它对应的旋转向量为 θn。由罗德里格斯公式可知:
- 旋转向量->旋转矩阵

- 旋转矩阵->旋转向量
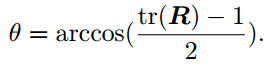
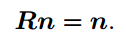
注:转轴 n 是矩阵 R 特征值 1 对应的特征向量。
1.3 欧拉角
欧拉角则提供了一种非常直观的方式来描述旋转——它使用了三个分离的转角,把一个旋转分解成三次绕不同轴的旋转。
假设一个刚体的前方(朝向我们的方向)为X 轴,右侧为 Y 轴,上方为 Z 轴,见图 3-3。那么, ZY X 转角相当于把任意旋转分解成以下三个轴上的转角:
- 绕物体的 Z 轴旋转,得到偏航角 yaw;
- 绕旋转之后的 Y 轴旋转,得到俯仰角 pitch;
- 绕旋转之后的 X 轴旋转,得到滚转角 roll。
注:欧拉角的一个重大缺点是会碰到著名的万向锁问题( Gimbal Lock)
1.4 四元数
四元数是 Hamilton 找到的一种扩展的复数. 它既是紧凑的,也没有奇异性。
一个四元数 q 拥有一个实部和三个虚部。


人们也用一个标量和一个向量来表达四元数:

注:我们能用单位四元数表示三维空间中任意一个旋转
四元数与旋转向量的对应关系
- 旋转向量->四元数
- 四元数->旋转向量
注:在四元数中, 任意的旋转都可以由两个互为相反数的四元数表示。
四元数的运算
1. 加法和减法

2. 乘法

3. 共轭

4. 模长


5. 逆

6. 数乘与点乘


用四元数表示旋转
注:p′表示为三维点 p经过四元数 q 旋转后的三维点。
四元数与旋转矩阵的关系
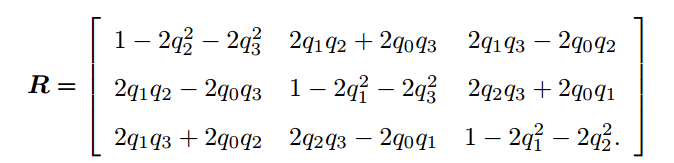
- 四元数->旋转矩阵
- 旋转矩阵->四元数

2. 关于其他几种变换
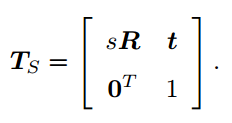
2.1 相似变换
相似变换比欧氏变换多了一个自由度,它允许物体进行均匀的缩放,其矩阵表示为:
2.2 仿射变换
与欧氏变换不同的是,仿射变换只要求 A 是一个可逆矩阵,而不必是正交矩阵。仿射变换也叫正交投影。经过仿射变换之后,立方体就不再是方的了,但是各个面仍然是平行四边形: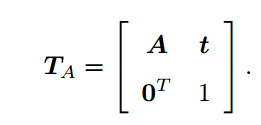
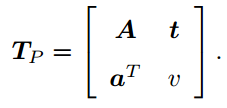
2.3 射影变换
射影变换是最一般的变换,它左上角为可逆矩阵 A,右上为平移 t,左下缩放 aT。2D 的射影变换一共有 8 个自由度, 3D 则共有 15 个自由度。
从真实世界到相机照片的变换可以看成一个射影变换。