1、半同步半异步线程池
在处理大量并发任务的时候,如果一个请求一个线程来处理任务,大量的线程创建将会消耗过多的资源,还增加了线程上下文切换的开销,而通过线程池技术可以很好的解决这个问题。
线程池技术通过在系统中预先创建一些线程,当任务请求来到的时候,从线程池中分配一个预先创建的线程来处理任务,在任务完成之后,线程不会销毁,还可以重用,等待下次任务的到来。这样就避免了大量线程的创建和销毁,从而节省系统资源,对于多核处理器,线程可以分配到多个cpu,提高并发效率。每个线程处理任务,独立阻塞,防止主线程被阻塞,导致其他请求得不到响应。
线程池分为半同步半异步线程池和领导者追随者线程池,半同步半异步线程池在实现上更加的简单,使用方便,也是最常用的线程池。
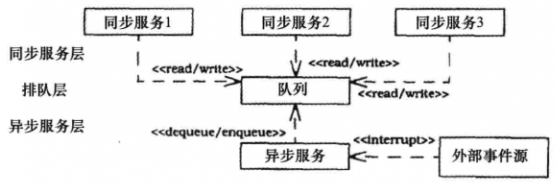
第一层为同步服务层,处理来自上层的任务请求,上层的任务请求是并发的,并不会马上处理,而是将这些任务放到一个同步队列中,等待处理。
第二层为同步队列,来自上层的任务都会加到队列中等待处理。
第三层是异步服务层,这一层中有多个线程同事处理排队任务中的任务,异步服务层从同步队列中取出任务并行的处理任务。
这种三层的结构可以最大程度的处理上层的并发请求,对于上层来说,只需要往队列中添加任务,不关心谁处理任务,主线程也不会阻塞,对于任务的具体处理,通过异步服务层的多线程异步并行来完成。
2、线程池
中间层是一个同步队列,允许多个线程同时添加或者取出任务,并且要保证操作过程是线程安全的。线程池有两个活动,一个是往同步队列中添加任务,另一个是从同步队列中取出任务。
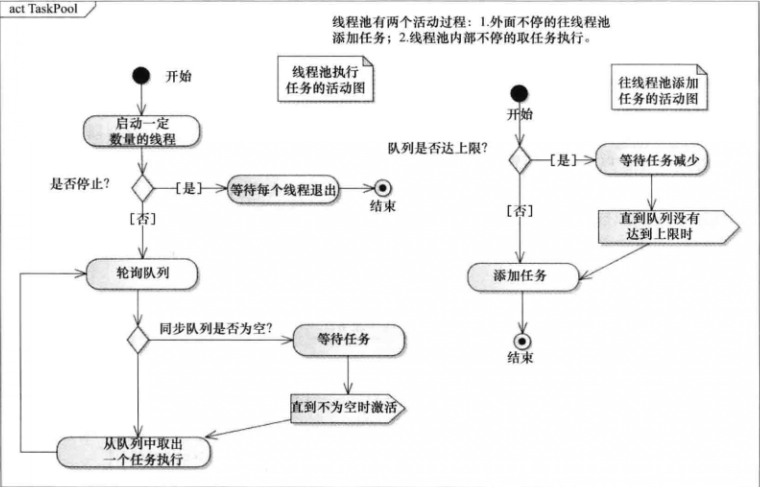
启动线程池会启动一定数量的线程,这些线程属于异步层,主要用来并行处理队列中任务,如果队列中的任务为空,则等待任务的到来,如果有任务,则从等待的线程中唤醒一定数量的线程来执行任务。
需要注意的是,队列中一定要限制任务的数量,避免任务过多导致内存暴涨。
3、同步队列
同步队列保存任务,为同步层提供添加新任务的接口,为异步层提供取任务的接口。同步队列中的锁用来线程同步,条件变量用来实现线程通信。
#include <list> #include <mutex> #include <thread> #include <condition_variable> #include <iostream> template<typename T> class SynQueue { public: SynQueue(int maxsize) : m_maxSize(maxsize), m_needStop(false) { } //添加事件,左值拷贝和右值移动 void Put(const T&x) { //调用private内部接口Add Add(x); } void Put(T &&x) { Add(x); } //从队列中取事件,取所有事件 void Take(std::list<T> &list) { //有wait方法必须用unique_lock //unique_lock有定时等待等功能,lock_guard就仅仅是RAII手法的互斥锁 //但unique_lock的性能稍低于lock_guard std::unique_lock<std::mutex> locker(m_mutex); //满足条件则唤醒,不满足阻塞 m_notEmpty.wait(locker, [this] { return m_needStop || NotEmpty(); }); if (m_needStop) { return; } std::cout << "取出所有任务..." << std::endl; list = std::move(m_queue); //唤醒其他阻塞在互斥锁的线程 m_notFull.notify_one(); } //取一个事件 void Take(T &t) { std::unique_lock<std::mutex> locker(m_mutex); m_notEmpty.wait(locker, [this] { return m_needStop || NotEmpty(); }); if (m_needStop) { return; } std::cout << "取出一个任务..." << std::endl; t = m_queue.front(); m_queue.pop_front(); m_notFull.notify_one(); } //停止所有线程在同步队列中的读取 void Stop() { { std::lock_guard<std::mutex> locker(m_mutex); m_needStop = true; } std::cout << "停止任务执行..." << std::endl; m_notFull.notify_all(); m_notEmpty.notify_all(); } //队列为空 bool Empty() { std::lock_guard<std::mutex> locker(m_mutex); return m_queue.empty(); } //队列为满 bool Full() { std::lock_guard<std::mutex> locker(m_mutex); return m_queue.size() == m_maxSize; } //队列大小 size_t Size() { std::lock_guard<std::mutex> locker(m_mutex); return m_queue.size(); } private: //往队列里添加事件,事件是范型的,c++11我们可以把函数通过std::function封装为对象。 template<typename F> void Add(F &&x) { std::unique_lock<std::mutex> locker(m_mutex); m_notFull.wait(locker, [this] { return m_needStop || NotFull(); }); if (m_needStop) { return; } std::cout << "添加一个任务..." << std::endl; m_queue.push_back(std::forward<F>(x)); m_notEmpty.notify_one(); } //队列未满 bool NotFull() const { bool full = m_queue.size() >= m_maxSize; if (full) { std::cout << "任务池满,等待取出任务..." << "线程ID:" << std::this_thread::get_id() << std::endl; } return !full; } //队列不为空 bool NotEmpty() const { bool empty = m_queue.empty(); if (empty) { std::cout << "任务池为空,等待添加任务..." << "线程ID:" << std::this_thread::get_id() << std::endl; } return !empty; } private: std::mutex m_mutex; //互斥锁 std::list<T> m_queue; //队列,存放任务 std::condition_variable m_notEmpty; //队列不为空的条件变量 std::condition_variable m_notFull; //队列不为满的条件变量 size_t m_maxSize; //任务队列最大长度 bool m_needStop; //终止标识 };
4、线程池
一个完整的线程池包括三种:同步服务层、排队层和异步服务层,其实也是一种消费者生产者模式,同步层是生产者,不断将新任务丢到队列中,因此线程池需要提供一个添加任务的接口;消费者是异步层,具体是从线程池中预先创建的线程去处理队列中的任务。线程池还提供一个停止的接口,在需要的时候,停止线程池的运行。
#include "SyncQueue.hpp" #include <functional> #include <thread> #include <atomic> #include <memory> const int MaxTaskCount = 10; class ThreadPool { public: //规定任务类型为void(),我们可以通过c++11 不定参数模板来实现一个可接受任何函数的范型函数模板,这样就是一个可以接受任何任务的任务队列了。 using Task = std::function<void()>; //hardware_concurrency检测硬件性能,给出默认线程数 ThreadPool(int numThreads = std::thread::hardware_concurrency()) : m_queue(MaxTaskCount) { //初始化线程,并通过shared_ptr来管理 Start(numThreads); } //销毁线程池 ~ThreadPool(void) { Stop(); } //终止所有线程,call_once保证函数只调用一次 void Stop() { std::call_once(m_flag, [this] { StopThreadGroup(); }); } //添加任务,普通版本和右值引用版本 void AddTask(const Task& task) { m_queue.Put(task); } void AddTask(Task && task) { m_queue.Put(std::forward<Task>(task)); } private: //停止线程池 void StopThreadGroup() { m_queue.Stop(); m_running = false; for (auto thread : m_threadgroup) { if (thread) thread->join(); } m_threadgroup.clear(); } void Start(int numThreads) { m_running = true; std::cout << "初始化线程池..." << std::endl; for (int i = 0; i < numThreads; ++i) { //智能指针管理,并给出构建线程的参数,线程调用函数和参数 m_threadgroup.push_back(std::make_shared<std::thread>(&ThreadPool::RunInThread, this)); } } //一次取出队列中全部事件 void RunInThread_list() { std::cout << "取出所有任务并执行..." << std::endl; while (m_running) { std::list<Task> list; m_queue.Take(list); for (auto &task : list) { if (!m_running) { return; } task(); } } } //一次只取一个事件 void RunInThread() { while (m_running) { Task task; if (!m_running) return; m_queue.Take(task); //执行任务 task(); } } private: //线程池 std::list<std::shared_ptr<std::thread>> m_threadgroup; //任务队列 SynQueue<Task>m_queue; //原子布尔值 std::atomic_bool m_running; //辅助变量->call_once std::once_flag m_flag; };
线程池中,有三个成员变量,一个是线程组,线程组中的线程是预先创建的,具体创建多少个,由外部决定,一般是CPU核数的线程达到最优的效率,线程组循环从同步队列中取出任务并执行,如果任务为空,线程组等待。另一个成员变量是同步队列,不仅用来做线程同步,还用来限制同步队列的上限。第三个成员变量是用来停止线程池的,为了保证线程安全,用了原子变量atomic_bool。
5、线程池的使用
通过简单的例子来使用半同步半异步线程池。线程池创建两个线程,通过外部线程不断地想线程池添加新任务,线程池内部的线程将会并行的处理同步队列中的任务。
#include <thread> #include <iostream> #include "ThreadPool.hpp" using namespace std; int main(int argc, char *argv[]) { ThreadPool pool; //pool.Start(2); std::thread thd1([&pool] { for (int i = 0; i < 10; i++) { auto thdId = this_thread::get_id(); cout << "线程 1 添加任务..." << endl; pool.AddTask([thdId] {cout << "线程1任务,线程ID:" << thdId << " 执行线程:" << this_thread::get_id() << endl; }); } }); std::thread thd2([&pool] { for (int i = 0; i < 10; i++) { auto thdId = this_thread::get_id(); cout << "线程 2 添加任务..." << endl; pool.AddTask([thdId] { cout << "线程2任务,线程ID:" << thdId << " 执行线程:" << this_thread::get_id() << endl; }); } }); thd1.join(); thd2.join(); //等待线程池执行30s cout << "主线程休眠等待..." << endl; this_thread::sleep_for(std::chrono::seconds(30)); pool.Stop(); return EXIT_SUCCESS; }