刺激响应agent
不具有内部状态而仅对其所处环境的即刻刺激有所反应的机器称为刺激响应(SR)agent
感知和动作
一机器人可以感知出周围8个单元是否空缺。这些传感器输入用二进制变量s1,s2 ,s3,s4 ,s5 ,s6,s7 ,s8 表示。
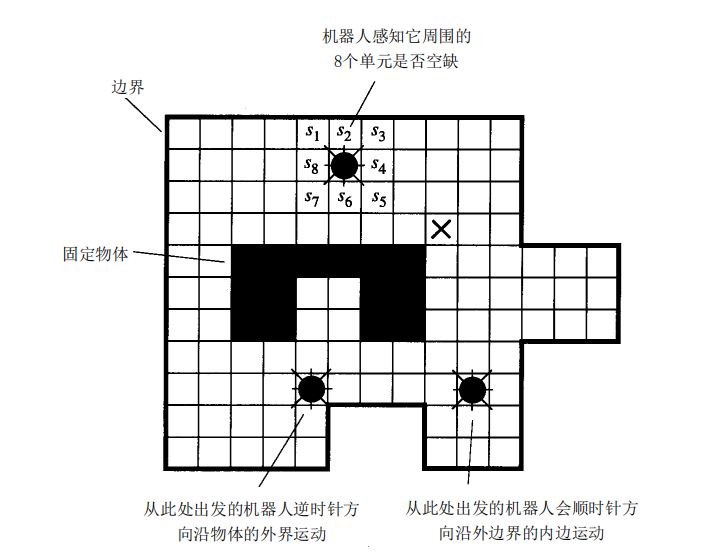
- 感知

例如当且仅当s2=1或s3=1时,x1=1
- 动作
可以规定

可以看出这些机器人可作出不同动作的条件恰好是特征值的布尔组合,这些特征值本身也是传感器输入的布尔组合。
-
布尔代数
-
布尔函数的类别和形式
- 项式
- 析取范式
- 合取范式
动作函数的表达和执行
-
产生式系统
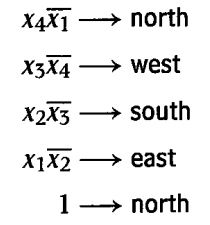
产生系统是动作函数的简单表达形式之一。一个产生系统包含一个有序规则序列,称为产生式规则或产生式。每一条规则写作“ci→ai”,1其中ci是条件部分,ai是动作部分。
利用布尔代数以及先前为沿边界行动的机器人而定义的特征文字,可以产生下面的沿边界行动路线的产生式系统表示:
-
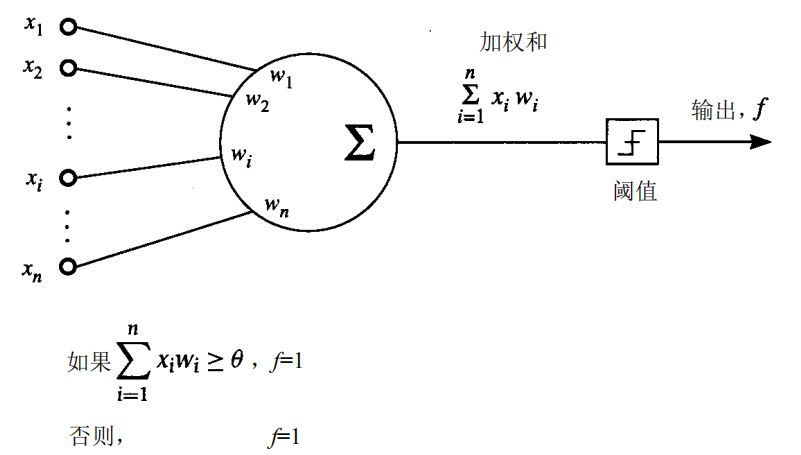
网络
TLU(阈值逻辑单元)网络
- 包含体系结构
