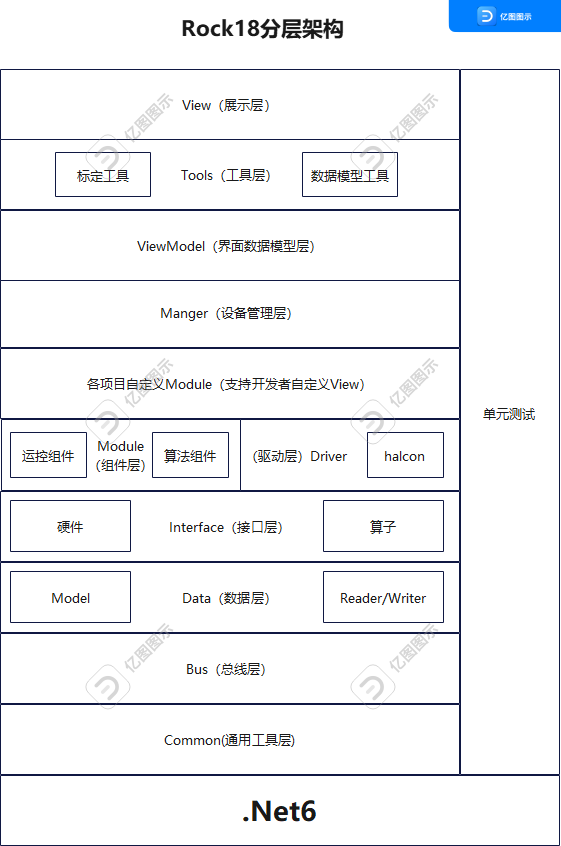
1. 总体框架图
2.框架能解决哪些问题?
-
问题1:
自动化设备包含龙门架、机械手、伺服、步进等电机、IO控制、定位及纠偏、界面展示等部分。其中硬件(伺服、IO等)是需要更换的,硬件的更换不影响整套系统,不影响指:逻辑无影响、代码无编辑。
-
解决思路:
1、面向接口编程,所有硬件及算法在业务逻辑层都是接口
2、接口自动依赖注入,所有接口通过manger层反射、注入方式实例化接口
3、变更硬件只新增对应接口实现即可,所有业务代码无需更改
-
问题2:
一台机器有很多通用的组件,如皮带、升降、翻转等,重复的逻辑太多,怎么减少重复逻辑?
-
解决办法:
1、组件化设计,把机器的皮带当成一个组件,升降为一个组件,一台机器是有N个独立组件构成,组件之间通过IO来交互(这部分思路参考一条整线有印刷机,贴片机、AOI等组成,机器之间通过IO来交互,机器内部也可以看做一条整线,由各个组件通过IO交互。只是交互是通过虚拟IO)
-
问题3:
组件抽象出来后,组件内部的编程模型怎么抽象,才能让编程更为简单方便? -
解决办法:
有限状态机模型,组件内部定义为很多状态,每个状态下做指定的动作,满足条件后跳转到下一个状态。- -
问题4:
代码复用率90%以上,开发人员只关注业务本身 -
解决办法:
rock框架使用插件式编程,每个项目只需要写一个类库,系统自动机加载
3.案例
-下面是一个从升降台取载具到轨道上,然后从升降台取pcb放在载具上,最后流出的一个组件,里面包涵了下相机定位,载具定位,cpk扣合检测的组件代码(这是rock17框架下组件实现,rock18已引入状态机,后续博文会介绍基于状态机的组件编写)
/// <summary>
/// 开线模式,从升降台取夹具,从升降台取pcb,扣合流出
/// </summary>
public class OpenLineModule : BasePlantModule
{
private enum Status
{
UnKnow,
WaitTakeFix,
TakeFix,
WaitPutFix,
PutFix,
WaitTakePcb,
TakePcb,
WaitPutPcb,
PutPcb,
/// <summary>
/// 扣合检测是否开启
/// </summary>
CheckCpk
}
/// <summary>
/// 夹具吸嘴
/// </summary>
public ICylinder FixSuction { get; set; }
/// <summary>
/// 取光板位置
/// </summary>
public Position TakeFixPoi { get; set; }
public Position PutFixPoi { get; set; }
/// <summary>
/// 允许取夹具
/// </summary>
public IInputIoDevice AllowTakeFix { set; get; }
/// <summary>
/// 取夹具完成
/// </summary>
public IOutputIoDevice TakeFixCompelte { set; get; }
/// <summary>
/// 下位机要夹具
/// </summary>
public IInputIoDevice AllowPutFix { set; get; }
public IOutputIoDevice PutEmptyPcbCompelte { set; get; }
/// <summary>
/// 扩展轨道
/// </summary>
public ExtendTrackBaffleModule ExtendTrackBaffleModule { get; set; }
private Status RobotStatus = Status.UnKnow;
protected override void argsInit()
{
if (this.FixSuction.IsOpen())
{
throw new Exception(String.Format("{0} have object", this.FixSuction.GetName()));
}
this.RobotStatus = Status.UnKnow;
this.TakeFixCompelte.Close();
this.PutEmptyPcbCompelte.Close();
this.FixSuction.Close();
base.argsInit();
}
protected override void handler()
{
switch (this.RobotStatus)
{
case Status.UnKnow: this.unKnow(); break;
case Status.WaitTakeFix: this.waitTakeFix(); break;
case Status.TakeFix: this.takeFix(); break;
case Status.WaitPutFix: this.waitPutFix(); break;
case Status.PutFix: this.putFix(); break;
case Status.WaitTakePcb: this.waitTakePcb(); break;
case Status.TakePcb:
this.takePcb();
this.RobotStatus = Status.WaitPutPcb; break;
case Status.WaitPutPcb: this.waitPutPcb(); break;
case Status.PutPcb: this.putPcb(); break;
case Status.CheckCpk: this.checkCpk(); break;
default: break;
}
base.handler();
}
private void unKnow()
{
this.RobotStatus = Status.WaitTakeFix;
}
private void waitTakeFix()
{
if (this.AllowTakeFix.IsOpen())
{
this.RobotStatus = Status.TakeFix;
}
}
private void takeFix()
{
this.FixSuction.Open();
this.Robot.GoToPosition(this.TakeFixPoi);
this.Sleep(100);
//到达上方一点
Position tempFixPoi= this.TakeFixPoi.Copy();
tempFixPoi.Z += 10;
this.Robot.GoToPosition(tempFixPoi);
this.GotoPoiUp(this.Robot, this.TakeFixPoi);
this.checkSuctionNozzle(this.FixSuction);
this.TakeFixCompelte.Open();
this.Robot.GoToPosition(this.SafePoi);
this.RobotStatus = Status.WaitPutFix;
}
private void waitPutFix()
{
if (this.AllowPutFix.IsOpen())
{
this.RobotStatus = Status.PutFix;
}
}
private void putFix()
{
this.Robot.GoToPosition(this.PutFixPoi);
this.FixSuction.Close();
this.Sleep(200);
this.GotoPoiUp(this.Robot, this.PutFixPoi);
this.ExtendTrackBaffleModule.SetStatusA();
this.Robot.GoToPosition(this.SafePoi);
this.RobotStatus = Status.WaitTakePcb;
}
private void waitTakePcb()
{
if (this.AllowTakeEmptyPcb.IsOpen())
{
this.RobotStatus = Status.TakePcb;
}
}
private void waitPutPcb()
{
this.RobotStatus = Status.PutPcb;
}
private void putPcb()
{
if (this.AllowPutEmptyPcb.IsOpen())
{
this.fixEmptyPcb();
this.RobotStatus = Status.CheckCpk;
}
}
private void checkCpk()
{
//光板cpk
this.emptyPcbCpk();
//放板完成
this.PutEmptyPcbCompelte.Open();
this.Robot.GoToPosition(this.SafePoi);
//到安全点为了给翻转组件留时间
this.PutEmptyPcbCompelte.Close();
this.RobotStatus = Status.WaitTakeFix;
}
public override bool Dispose()
{
this.TakeFixCompelte.Close();
this.PutEmptyPcbCompelte.Close();
return base.Dispose();
}
}
}
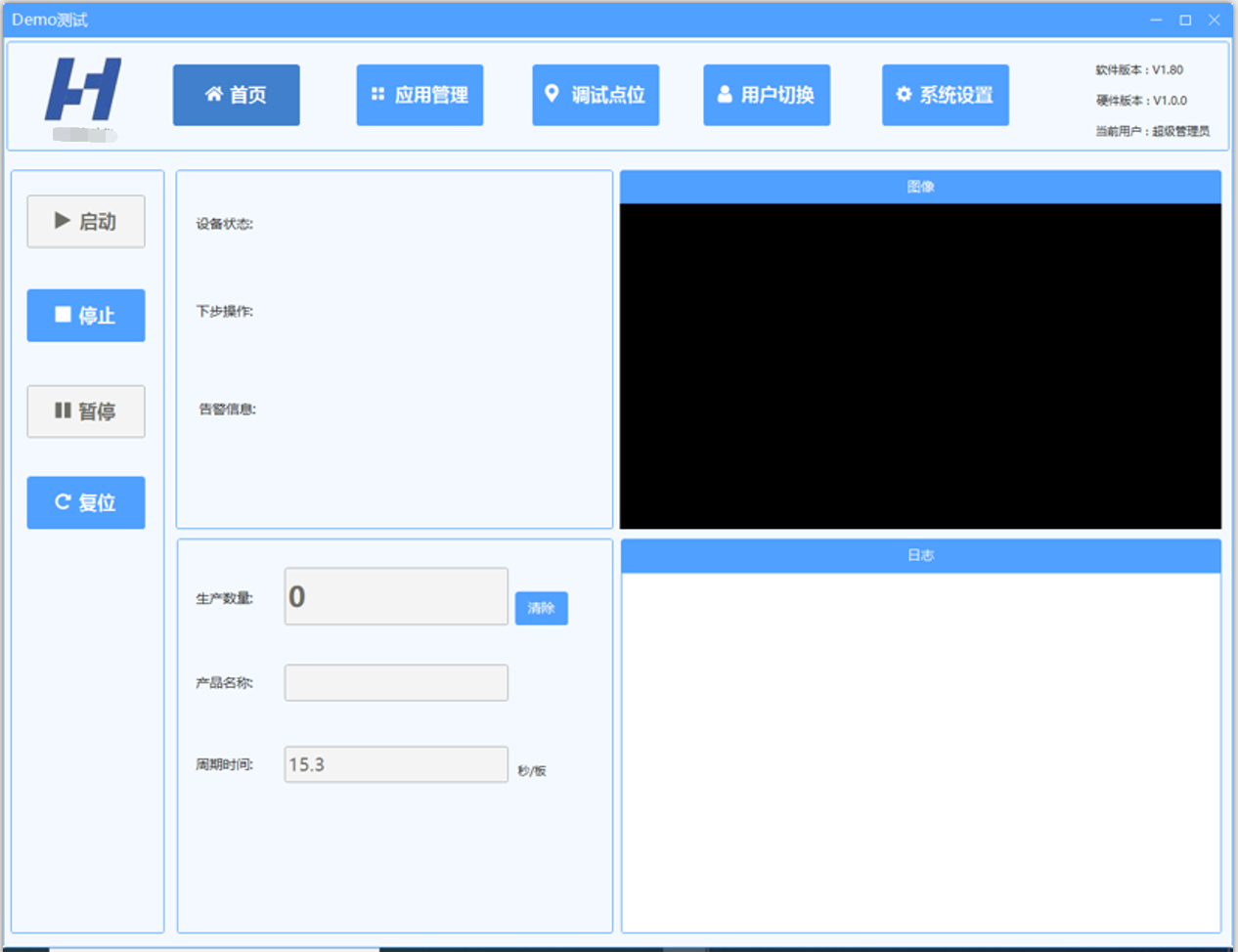
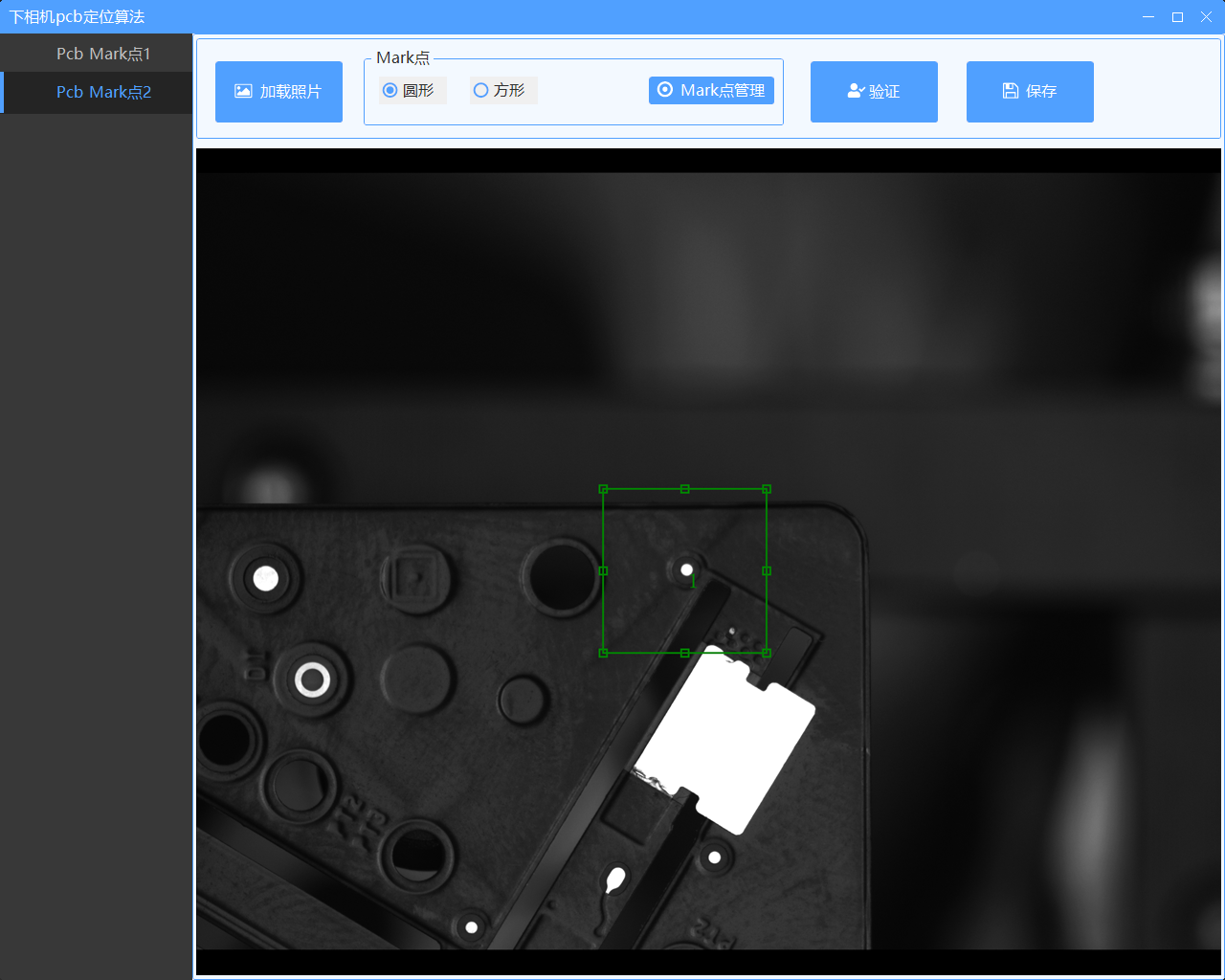
4.界面部分效果
主界面
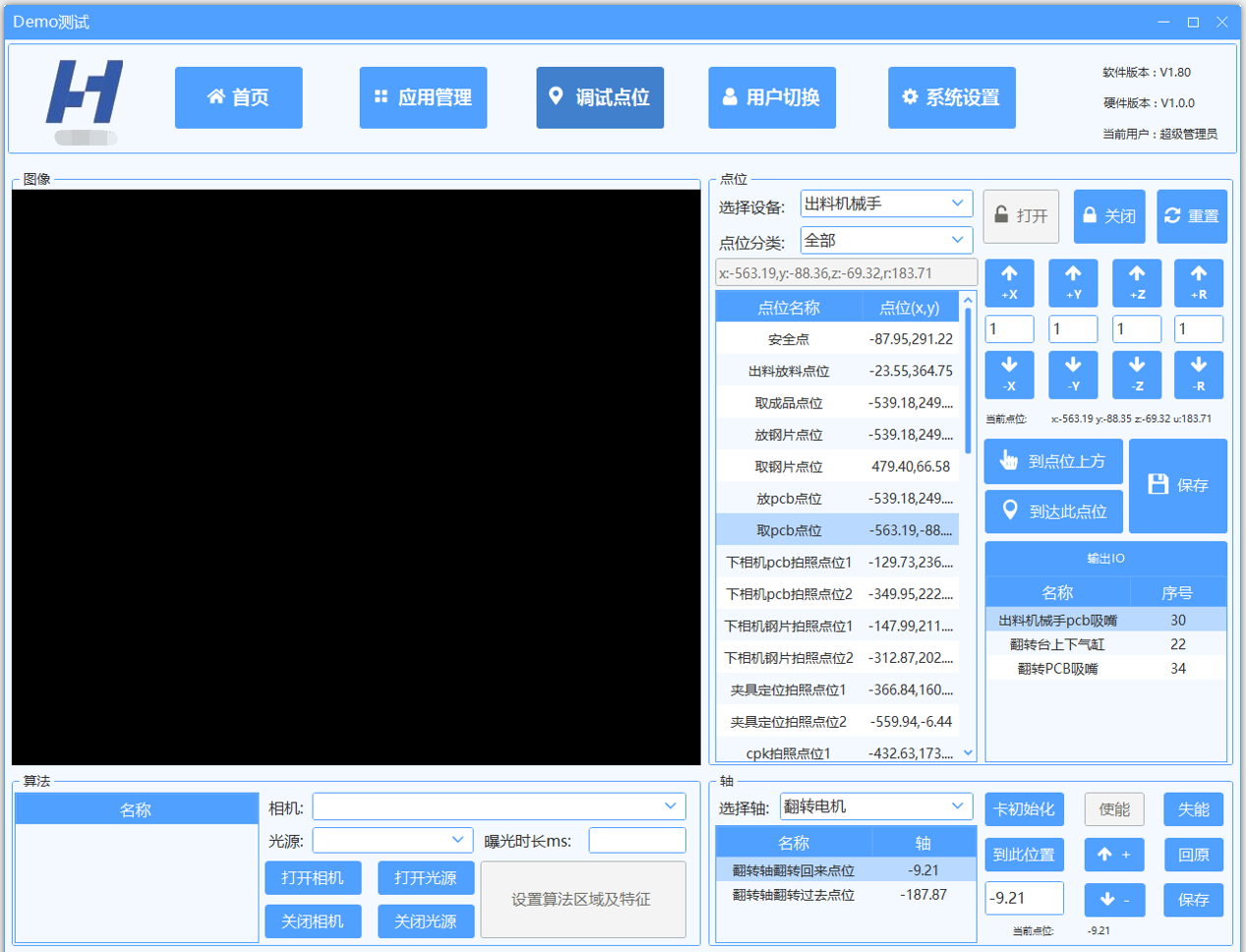
点位调试,算法,轴,io与点位联动
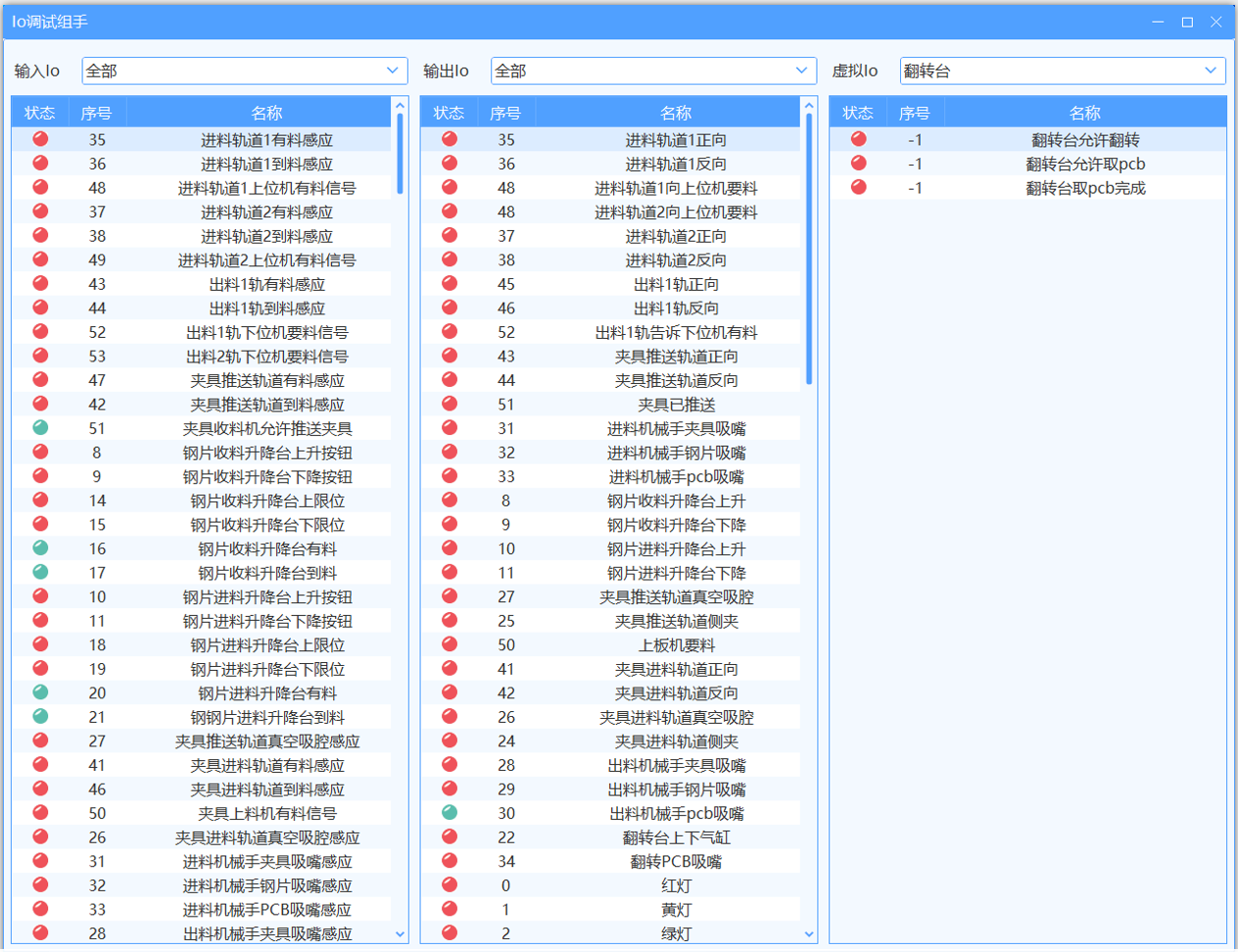
io助手
算法调试
5.后续计划
- 组件配置的编写逻辑与注入实现
- 基于状态机的组件编写
- 系统暂停继续实现逻辑
- 异常报警继续实现逻辑
- 算法交互部分实现(矩形框的拖拽,缩放,等比例获取区域等)
- 配置热更新实现
- 。。。