1、机械手头部相机与龙门架头部相机的区别?
- 上篇文字讲解了龙门架头部相机标定原理及方法,中间有提到只适用于龙门架,那为什么呢?
- 答:龙门架在运动过程中,固定在龙门架上的移动相机相对与龙门架本身只有平移关系,而架在机械手上的相机存在角度旋转;机械手在运动过程中机械臂J1与机械臂J2两个的角度一直在变化,而龙门架的X,Y并没有旋转
2、原理分析
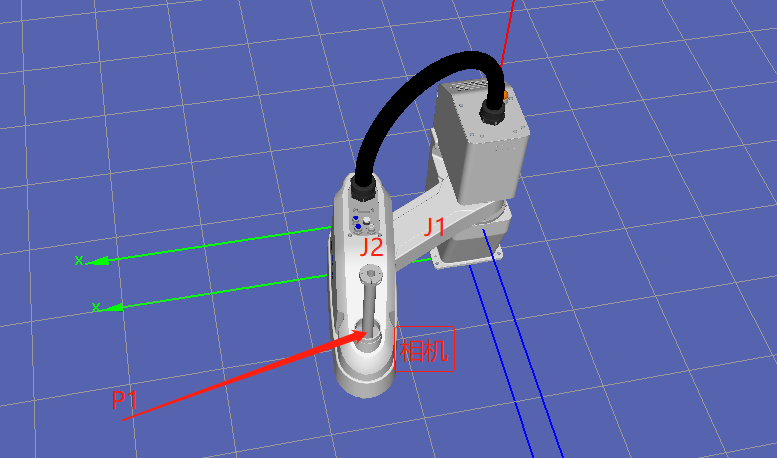
- 如上图所示,J2上面挂载一个相机, 怎么计算旋转关系呢?
- 换个角度看问题,相机相对于P1点的相对位置从来就没有改变,也就是说图像坐标点相对于P1坐标点从来没有改变。
- 假如新建一个坐标系W2,W2以P1为坐标系原点,J2臂延长方向为X轴,J2垂直方向为Y轴。那么相机的图像坐标系与W2存在固定的仿射变换关系(和固定相机一样了)
- 而W2与机械手坐标系存在旋转与平移的关系,平移关系可以通过P1的点位来确定,旋转关系可以通过J1,J2的角度来确定。
- 通过这样分解机械手头部相机就变成了坐标系(平移+旋转)+仿射变换了。
3、详细步骤
4、源码
private void updatePoiMatrix(Position pcbPoi,Position poi1, Position poi2,Position takePhotoPoi)
{
//更新对应的数组
imagePoiList.Add(new Position() { X = (poi1.X + poi2.X) / 2, Y = (poi1.Y + poi2.Y) / 2 });
//dstPoi- takePhotoPoi,获取takePhoto的J1与J2,
System.Windows.Point p1=new System.Windows.Point();
p1.X = pcbPoi.X - takePhotoPoi.X;
p1.Y = pcbPoi.Y - takePhotoPoi.Y;
var jAngles=this.currentRobot.GetJAngle();
double angleJ = -jAngles[0] - jAngles[1];
System.Windows.Point p2= MatrixHelper.GetRotatePoint(p1, angleJ, new System.Windows.Point() { X = 0, Y = 0 });
Position newDstPoi = new Position();
newDstPoi.X = p2.X;
newDstPoi.Y = p2.Y;
robotPoiList.Add(newDstPoi);
}
/// <summary>
/// 逆时针旋转,获取旋转后的点位
/// </summary>
/// <param name="p1">待旋转的点</param>
/// <param name="angle">旋转角度</param>
/// <param name="center">旋转中心</param>
/// <returns></returns>
public static Point GetRotatePoint(Point p1, double angle, Point center)
{
//使用旋转矩阵求值
RotateTransform rotateTransform = new RotateTransform(angle, center.X, center.Y);
Point p = new Point(p1.X, p1.Y);
System.Windows.Point p2 = rotateTransform.Transform(p);
return p2;
}
5. 后续计划[敬请期待],如需完整代码请微信联系
- 下相机定位算法
- 基于头部相机的载具定位算法
- 基于顶部相机的塑盘取料算法
- 基于头部相机的检测算法实现
- 一种面向接口接口、依赖注入的运控框架的总体介绍及分层实现