1、前言
在工业产品缺陷检测中,基于传统的图像特征的缺陷分类的准确率达不到实际生产的要求,因此想采用CNN来进行缺陷分类。
传统缺陷分类思路:
1、缺陷图片分离:先采用复杂的图像处理方法,将缺陷从采集的图像中分离处理;
2、特征向量构建:通过对不同缺陷种类的特征进行分析,定义需要提取的n维特征(比如缺陷长、宽、对比度、纹理特征、熵、梯度等),构成一组描述缺陷的
特征向量;特征向量的构建需要对实际的问题有很深入的分析,并且需要有很深厚的图像处理知识;这也是传统分类问题中最难的部分。
3、特征向量归一化:由于特征向量每个维度的度量差别很大(比如缺陷长50像素,对比度0.03),因此需要进行特征缩放,特征归一化;
4、人工标记缺陷:将缺陷图片存储在人工标记的文件夹内;
5、采用SVM对缺陷进行分类,分类准确率85%左右。
2、CNN网络构建
在缺陷图片分离和人工标记后,构建CNN网络模型;由于工业检测中对实时性要求很高,因此想采用比较简单的网络结构来提高训练的速度和检测速度;
网络构建:本文采用LeNet网络结构的基本思路,构建一个简单的网络
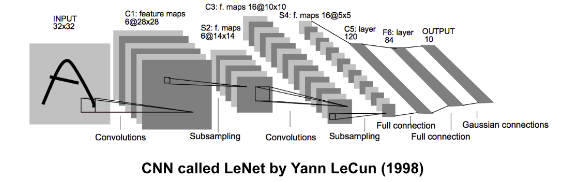
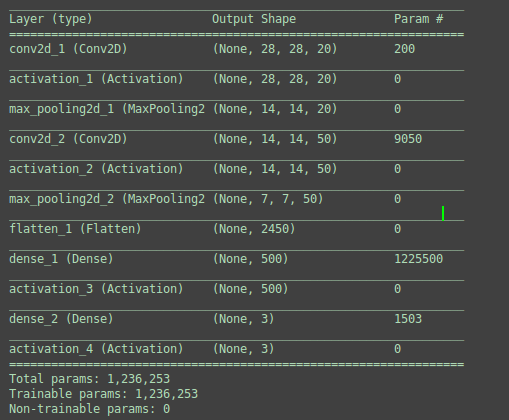
图1:Tensorflow输出的网络模型
3、模型训练和测试
3.1 原始模型测试
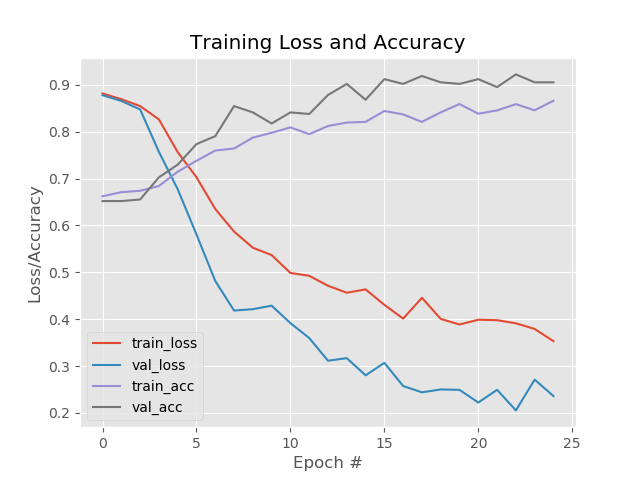
开始以为模型可能会出现过拟合的问题,不过从精度和损失曲线看来,没有过拟合问题,到是模型初始迭代的时候陷入了一个局部循环状态,可能是没有得到特别好的特征或者是随机选择训练模型的数据集没有完全分散,也有可能是训练的次数太少了。训练集上的准确率有点低,因此需要用更好的模型,但是模型怎么改呢??尽管CNN可以自己训练出FIlters,但是依然不能很清晰的看到图像被滤波后是怎么样的状态(图2,图3),对于一直做图像底层算法的人来说,有点很不爽。

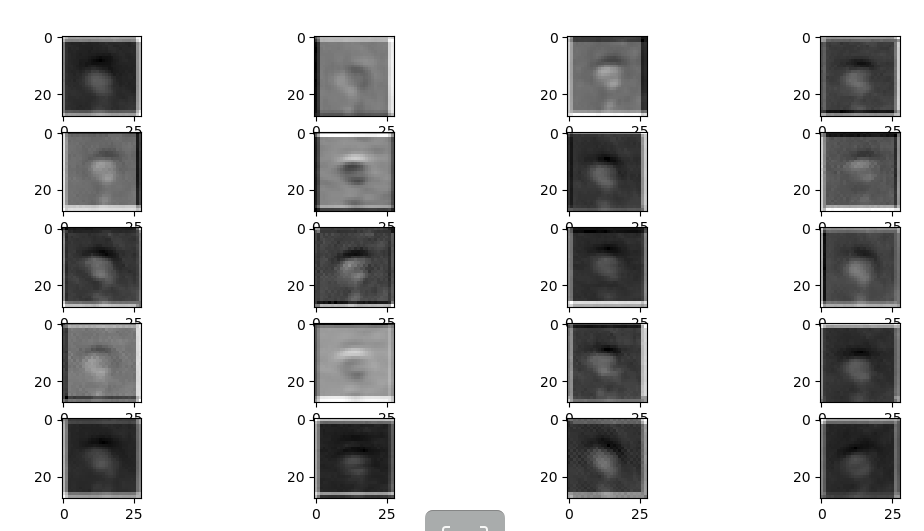
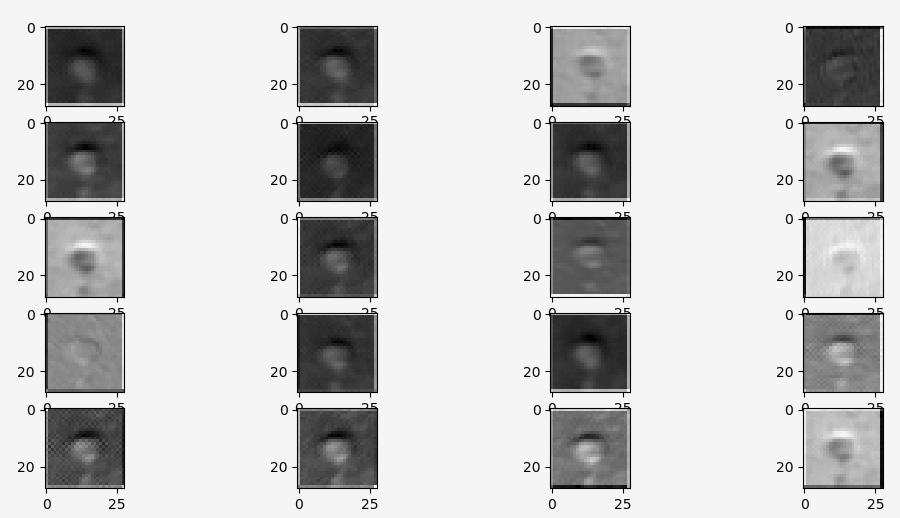
图2 :卷积第一层
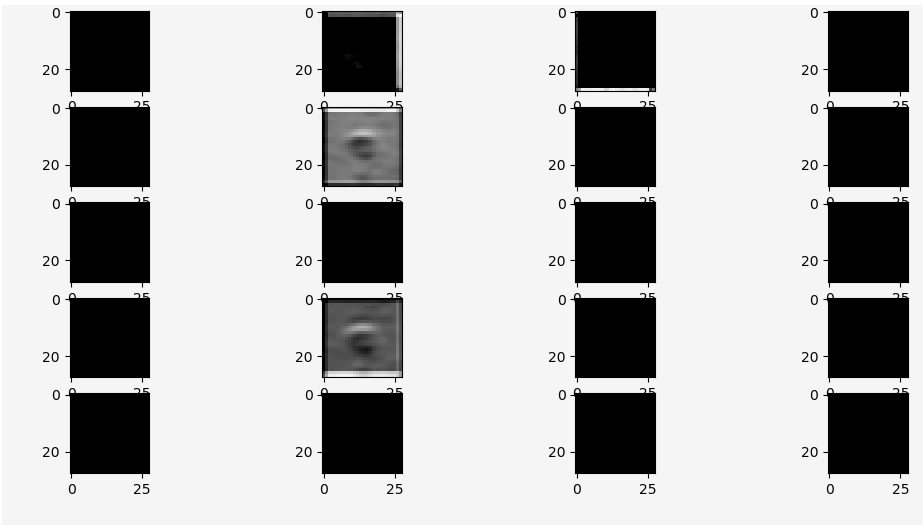
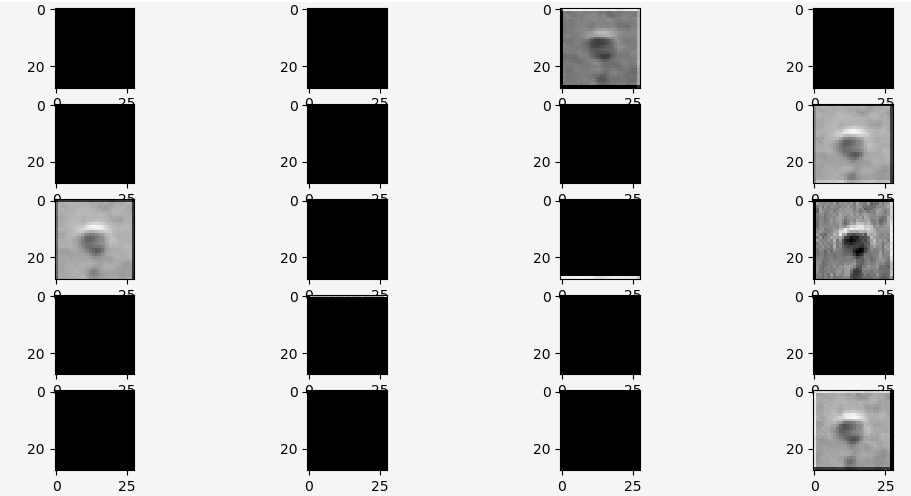
图3:Relu激活函数层
通过分析图2,发现滤波整体效果还不错,缺陷的地方都能清晰的反映出来;但是本来输入的缺陷是往下凹的,滤波后的缺陷很多是向上凸的,不符合实际情况。
分析图3,发现经过Relu激活函数后,只留下了很明显向下凹的缺陷特征图片,但是有效的特征图片(FeatureMap)太少,只有2个。
图4: 上凸图片数据
图5:下凹图片数据
为了能得到更多的符合实际的缺陷特征图片,考虑到需要更加突出缺陷边缘,以致不被周围大片图像的干扰,因此决定将卷积核变小;卷积核由默认的5x5改为3x3.
3.2 优化卷积核大小后
模型整体的精度有明显的上升,经过Relu后的有效FeatureMap增加了。有点疑问的是validation数据集的准确率比训练还高5-8个点???
4、Code
# -*- coding: utf-8 -*- # @Time : 18-7-25 下午2:33 # @Author : DuanBin # @Email : 20092758@cqu.edu.cn # @File : catl_train.py # @Software: PyCharm # USAGE # python catl_train.py --dataset data --model catl.model # import the necessary packages from keras.preprocessing.image import ImageDataGenerator from keras.optimizers import Adam from sklearn.model_selection import train_test_split from keras.preprocessing.image import img_to_array from keras.utils import to_categorical from keras.models import Model from keras.models import load_model from lenet import LeNet from imutils import paths import matplotlib.pyplot as plt import numpy as np import argparse import random import cv2 import os # set the matplotlib backend so figures can be saved in the background import matplotlib matplotlib.use("Agg") dataPath = "data" modelPath = "catl_5_5.model" plotPath = "catl_plot_5_5_blog.png" # initialize the number of epochs to train for, initia learning rate, # and batch size EPOCHS = 50 INIT_LR = 0.001 BS = 3 classNumber = 3 imageDepth = 1 # initialize the data and labels print("[INFO] loading images...") data = [] labels = [] # grab the image paths and randomly shuffle them imagePaths = sorted(list(paths.list_images(dataPath))) # args["dataset"]))) random.seed(42) random.shuffle(imagePaths) # loop over the input images for imagePath in imagePaths: # load the image, pre-process it, and store it in the data list image = cv2.imread(imagePath, 0) image = cv2.resize(image, (28, 28)) image = img_to_array(image) data.append(image) # extract the class label from the image path and update the # labels list label = imagePath.split(os.path.sep)[-2] if label == "dity": label = 0 elif label == "tan": label = 1 elif label == "valley": label = 2 labels.append(label) # scale the raw pixel intensities to the range [0, 1] data = np.array(data, dtype="float") / 255.0 labels = np.array(labels) # partition the data into training and testing splits using 75% of # the data for training and the remaining 25% for testing (trainX, testX, trainY, testY) = train_test_split(data, labels, test_size=0.3, random_state=42) print(trainX.shape) # convert the labels from integers to vectors trainY = to_categorical(trainY, num_classes=classNumber) testY = to_categorical(testY, num_classes=classNumber) print(trainY.shape) print(testX.shape) # construct the image generator for data augmentation aug = ImageDataGenerator(rotation_range=30, width_shift_range=0.1, height_shift_range=0.1, shear_range=0.2, zoom_range=0.2, horizontal_flip=True, fill_mode="nearest") # # initialize the model print("[INFO] compiling model...") model = LeNet.build(width=28, height=28, depth=imageDepth, classes=classNumber) opt = Adam(lr=INIT_LR, decay=INIT_LR / EPOCHS) model.compile(loss="categorical_crossentropy", optimizer=opt, metrics=["accuracy"]) model.summary() # train the network print("[INFO] training network...") H = model.fit_generator(aug.flow(trainX, trainY, batch_size=BS), validation_data=(testX, testY), steps_per_epoch=len(trainX) // BS, epochs=EPOCHS, verbose=1) # save the model to disk print("[INFO] serializing network...") model.save(modelPath) # args["model"]) model.save_weights("catl_5_5_wight.h5") # plot the training loss and accuracy plt.style.use("ggplot") plt.figure() N = EPOCHS plt.plot(np.arange(0, N), H.history["loss"], label="train_loss") plt.plot(np.arange(0, N), H.history["val_loss"], label="val_loss") plt.plot(np.arange(0, N), H.history["acc"], label="train_acc") plt.plot(np.arange(0, N), H.history["val_acc"], label="val_acc") plt.title("Training Loss and Accuracy") plt.xlabel("Epoch #") plt.ylabel("Loss/Accuracy") plt.legend(loc="lower left") plt.savefig(plotPath) # args["plot"]) plt.show() layer_outputs = [layer.output for layer in model.layers] activation_model = Model(inputs=model.input, outputs=layer_outputs) activations = activation_model.predict(testX[0].reshape(1, 28, 28, 1)) def display_activation(activations, col_size, row_size, act_index): activation = activations[act_index] activation_index = 0 fig, ax = plt.subplots(row_size, col_size, figsize=(row_size * 2.5, col_size * 1.5)) for row in range(0, row_size): for col in range(0, col_size): ax[row][col].imshow(activation[0, :, :, activation_index], cmap='gray') activation_index += 1 plt.show() display_activation(activations, 4, 5, 1)
# import the necessary packages from keras.models import Sequential from keras.layers.convolutional import Conv2D from keras.layers.convolutional import MaxPooling2D from keras.layers.core import Activation from keras.layers.core import Flatten from keras.layers.core import Dense from keras.layers.core import Dropout from tensorflow.keras import backend as K class LeNet: @staticmethod def build(width, height, depth, classes): # initialize the model model = Sequential() inputShape = (height, width, depth) # if we are using "channels first", update the input shape if K.image_data_format() == "channels_first": inputShape = (depth, height, width) else: inputShape = (width, height, depth) # first set of CONV => RELU => POOL layers model.add(Conv2D(20, (3, 3), padding="same", input_shape=inputShape)) model.add(Activation("relu")) model.add(MaxPooling2D(pool_size=(2, 2), strides=(2, 2))) # second set of CONV => RELU => POOL layers model.add(Conv2D(50, (3, 3), padding="same")) model.add(Activation("relu")) model.add(MaxPooling2D(pool_size=(2, 2), strides=(2, 2))) # first (and only) set of FC => RELU layers model.add(Flatten()) model.add(Dense(500)) model.add(Activation("relu")) # softmax classifier model.add(Dense(classes)) model.add(Activation("softmax")) # return the constructed network architecture return model