回顾A*算法,偶得一源代码,略有瑕疵,改正之,并置于下。


1 using System; 2 using System.Collections.Generic; 3 using System.Linq; 4 using System.Text; 5 using System.Threading.Tasks; 6 7 namespace AStarOne 8 { 9 class AStar 10 { 11 public const int OBLIQUE = 14;//sqrt(2.0) is 1.414; they have been amplified. 12 public const int STEP = 10; 13 public int[,] AStarArray { get; private set; } 14 List<Point> CloseList; // Close List 15 List<Point> OpenList; // Open List 16 17 public AStar(int [,] aStar) 18 { 19 this.AStarArray = aStar; 20 OpenList = new List<Point>(AStarArray.Length);// Impossible to be bigger than the number of all data 21 CloseList = new List<Point>(AStarArray.Length); 22 } 23 24 /// <summary> 25 /// Find an achievable path from start to end 26 /// </summary> 27 /// <param name="start"></param> 28 /// <param name="end"></param> 29 /// <param name="IsIgnoreCorner">If ignore diagonal spot</param> 30 /// <returns></returns> 31 public Point FindPath(Point start, Point end, bool IsIgnoreCorner) 32 { 33 OpenList.Add(start); 34 while (0 != OpenList.Count) 35 { 36 var tempStart = OpenList.MinPoint();// get the minimum F 37 OpenList.RemoveAt(0); 38 CloseList.Add(tempStart); 39 40 var surroundPoints = GetSurroundPoints(tempStart, IsIgnoreCorner);// Get surrounding points 41 foreach (var point in surroundPoints) 42 { 43 if (OpenList.Exists(point))// If existing in the open list, choose the minimum G between tempStart and point; Update 44 { 45 FoundPoint(tempStart, point); 46 } 47 else 48 { 49 NotFoundPoint(tempStart, end, point); 50 } 51 } 52 53 if (OpenList.Get(end) != null) 54 return OpenList.Get(end); 55 } 56 57 return OpenList.Get(end); 58 } 59 60 private void FoundPoint(Point tempStart, Point point) 61 { 62 var G = CalcG(tempStart, point); 63 if (G < point.G)// the minimum one 64 { 65 point.ParentPoint = tempStart; 66 point.G = G; 67 point.CalcF(); 68 } 69 } 70 71 private void NotFoundPoint(Point tempPoint, Point end, Point point) 72 { 73 point.ParentPoint = tempPoint; 74 point.G = CalcG(tempPoint, point); 75 point.H = CalcH(end, point); 76 point.CalcF(); 77 OpenList.Add(point);// This is quite important 78 } 79 80 private int CalcG(Point start, Point point)// Calc the cost from start to point 81 { 82 int G = (Math.Abs(point.X - start.X) + Math.Abs(point.Y - start.Y)) == 1 ? STEP : OBLIQUE;// Should be 1 83 int parentG = point.ParentPoint != null ? point.ParentPoint.G : 0; 84 return G + parentG; 85 } 86 87 private int CalcH(Point end, Point point)// Estimate the cost to reach the target 88 { 89 int step = Math.Abs(point.X - end.X) + Math.Abs(point.Y - end.Y); 90 return step * STEP; 91 } 92 93 public List<Point> GetSurroundPoints(Point point, bool IsIgnoreCorner) 94 { 95 var surroundPoints = new List<Point>(9); 96 97 for (int x = point.X - 1; x <= point.X + 1; x++) 98 { 99 for (int y = point.Y - 1; y <= point.Y + 1; y++) 100 { 101 if (CanReach(point, x, y, IsIgnoreCorner)) 102 surroundPoints.Add(x, y); 103 } 104 } 105 106 return surroundPoints; 107 } 108 109 private bool CanReach(int x, int y) 110 { 111 return AStarArray[x, y] == 0; 112 } 113 114 public bool CanReach(Point start, int x, int y, bool IsIgnoreCorner) 115 { 116 if (!CanReach(x, y) || CloseList.Exists(x, y))// Cannot reach or has been handled 117 { 118 return false; 119 } 120 else 121 { 122 if (Math.Abs(x - start.X) + Math.Abs(y - start.Y) == 1)// Adjacent but not diagonal 123 { 124 return true; 125 } 126 else 127 { 128 if (CanReach(Math.Abs(x - 1), y) && CanReach(x, Math.Abs(y - 1)))// Make sure diagnonal but not necessary 129 { 130 return IsIgnoreCorner; 131 } 132 else 133 { 134 return false; 135 } 136 } 137 } 138 } 139 } 140 141 public class Point 142 { 143 public Point ParentPoint { get; set; } 144 public int F { get; set; } // F = G + H 145 public int G { get; set; } 146 public int H { get; set; } 147 public int X { get; set; } 148 public int Y { get; set; } 149 150 public Point(int x, int y) 151 { 152 this.X = x; 153 this.Y = y; 154 } 155 156 public void CalcF() 157 { 158 this.F = this.G + this.H; 159 } 160 } 161 162 public static class ListHelper 163 { 164 public static bool Exists(this List<Point> points, Point point) 165 { 166 foreach (var p in points) 167 if ((p.X == point.X) && (p.Y == point.Y)) 168 return true; 169 170 return false; 171 } 172 173 public static bool Exists(this List<Point> points, int x, int y) 174 { 175 foreach (var p in points) 176 if ((p.X == x) && (p.Y == y)) 177 return true; 178 179 return false; 180 } 181 182 public static Point MinPoint(this List<Point> points) 183 { 184 points = points.OrderBy(p => p.F).ToList(); 185 return points[0]; 186 } 187 188 public static void Add(this List<Point> points, int x, int y) 189 { 190 points.Add(new Point(x, y)); 191 } 192 193 public static Point Get(this List<Point> points, Point point) 194 { 195 foreach (Point p in points) 196 if ((p.X == point.X) && (p.Y == point.Y)) 197 return p; 198 199 return null; 200 } 201 202 public static void Remove(this List<Point> points, int x, int y) 203 { 204 foreach (var point in points) 205 if ((point.X == x) && (point.Y == y)) 206 points.Remove(point); 207 } 208 } 209 }
测试代码如下:
1 using System; 2 using System.Collections.Generic; 3 using System.Linq; 4 using System.Text; 5 using System.Threading.Tasks; 6 7 namespace AStarOne 8 { 9 class Program 10 { 11 static void Main(string[] args) 12 { 13 int[,] array = { 14 { 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1}, 15 { 1, 0, 1, 1, 1, 0, 1, 0, 0, 0, 0, 1}, 16 { 1, 0, 1, 1, 1, 0, 0, 0, 0, 0, 0, 1}, 17 { 1, 0, 0, 0, 0, 0, 1, 0, 0, 1, 1, 1}, 18 { 1, 1, 1, 0, 0, 0, 0, 0, 1, 1, 0, 1}, 19 { 1, 1, 0, 1, 0, 0, 0, 0, 0, 0, 0, 1}, 20 { 1, 0, 1, 0, 0, 0, 0, 1, 0, 0, 0, 1}, 21 { 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1} 22 }; 23 24 AStar astar = new AStar(array); 25 26 Point start = new Point(1, 1); 27 Point end = new Point(6, 10); 28 var parent = astar.FindPath(start, end, false); 29 30 Console.WriteLine("Print path:"); 31 while (parent != null) 32 { 33 //Console.WriteLine(parent.X + ", " + parent.Y); 34 array[parent.X, parent.Y] = 8; 35 parent = parent.ParentPoint; 36 } 37 38 for (int i = 0; i < 8; i++) 39 { 40 for (int j = 0; j < 12; j++) 41 { 42 Console.Write(array[i,j] + " "); 43 } 44 Console.WriteLine(); 45 } 46 } 47 } 48 }
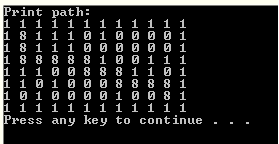
运行结果如下(注意‘8’的位置即是路径):