【蓝桥杯单片机02】LED的基本控制
广东职业技术学院 欧浩源
在CT107D单片机综合训练平台实现LED的基本控制和其他单片机开发平台不一样,不单单是控制几个LED实现跑马灯这么简单。因为在这个平台上要掌握74CH138译码器和74HC573锁存器的使用才能实现对LED的基本控制。因此,这个单元的重点不是LED的控制,而是掌握译码器和锁存器的基本使用。
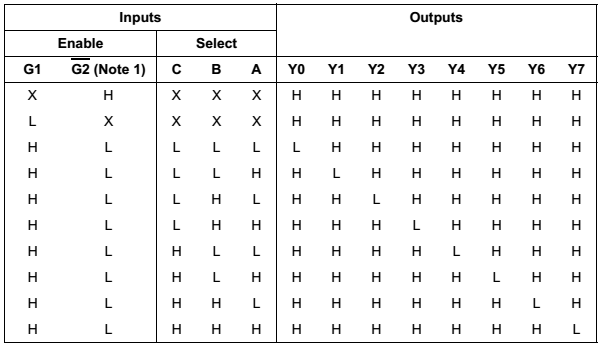
1、74HC138:三八译码器
用非专业的语言来解释,这个芯片实现的功能就是用3个输入引脚,实现8个输出引脚,而且这个八个输出引脚中只要一个低电平。对于这个芯片,你不需要搞清楚它的内部结构和工作原理,只需要把真值表记住就行了。注意:是要记住。
2、74HC573:锁存器
用非专业的语言来解释,锁存器就是能够把输出的数据保存住,不会受到输入变化的影响。
573锁存器有20个引脚,D1~D8是数据输入端,Q1~Q8是数据输出端,LE为锁存控制端。当锁存使能端LE为高时,573的锁存对于数据是透明的(也就是说输出同步)。当锁存使能变低时,符合建立时间和保持时间的数据会被锁存。
简单的说就是,LE为高电平时,Q1~Q8输出和D1~D8输入是一样的;LE为低电平时,Q1~Q8输出不受D1~D8输入的变化影响。明白这个就掌握了该锁存器的使用。
3、74HC02:或非门
从电路原理图上可以分析出,单片机的WR引脚或者GND和译码器的Y4引脚作为74HC02的输入。可以通过J13的跳帽选择是WR还是GND作为74HC02的输入。如果译码器的Y4输出低电平,那么74HC02的输出Y4C将为高电平,而该引脚接到74HC573锁存器的LE引脚,这时候锁存器处于数据联通的开放状态,也就是单片机可以控制LED灯。如果单片机不向外设输出数据,或者译码器的Y4没有输出低电平的话,则74HC573处于锁存状态,即单片机不能控制LED灯。
4、单元训练题目

5、参考源码
#include "reg52.h" sbit HC138_A = P2^5; sbit HC138_B = P2^6; sbit HC138_C = P2^7; void Delay(unsigned int time) { while(time--); while(time--); } /*======================================================= *通过HC138译码器控制HC573锁存器 *参数:n--HC138译码器低电平引脚 4:Y4输出低电平 5:Y5输出低电平 6:Y6输出低电平 7:Y7输出低电平 8:Y4~Y7全部输出高电平 *·返回值:无。 *设计:欧浩源 广东职业技术学院 & 小蜜蜂科教 *时间:2018年1月26日 =======================================================*/ void Init74HC138(unsigned char n) { switch(n) { case 4: HC138_A = 0; HC138_B = 0; HC138_C = 1; break; case 5: HC138_A = 1; HC138_B = 0; HC138_C = 1; break; case 6: HC138_A = 0; HC138_B = 1; HC138_C = 1; break; case 7: HC138_A = 1; HC138_B = 1; HC138_C = 1; break; case 8: HC138_A = 0; HC138_B = 0; HC138_C = 0; break; } } void LEDRunning() { char i = 0; P0 = 0xaa; Delay(60000); Delay(60000); P0 = 0x55; Delay(60000); Delay(60000); for(i = 0; i < 3; i++) { P0 = 0x00; Delay(60000); P0 = 0xff; Delay(60000); } for(i = 0; i < 8; i++) { P0 <<= 1; Delay(60000); } for(i = 0; i < 8; i++) { P0 <<= 1; P0 |= 1; Delay(60000); } } main() { Init74HC138(4); while(1) { LEDRunning(); } }