匹配,就是从图中找到一些边。使得这些边两端的点没有重复的。其中能找到最多边的就是最大匹配。
事实证明,这个东西在一般图上非常难搞,但二分图很特别,有高效解决的方法。其中最简单易懂的就是网络流和匈牙利算法。
网络流建模
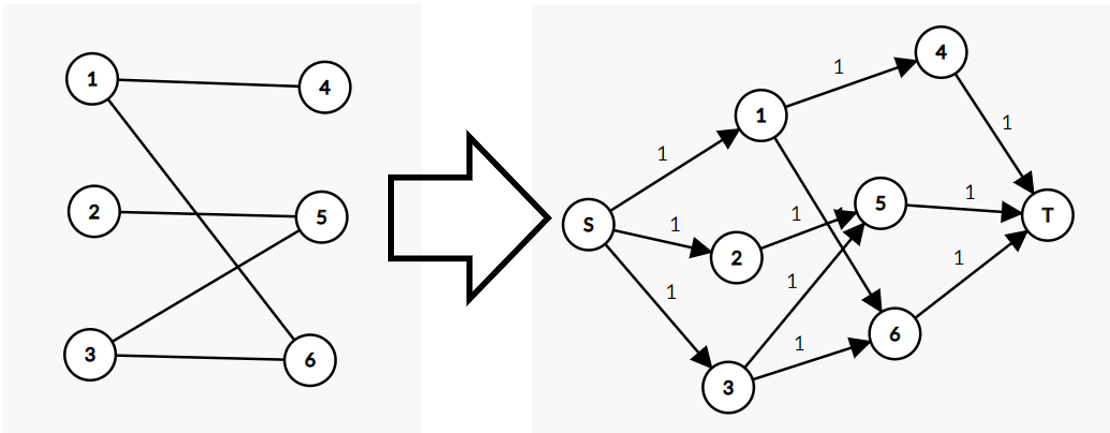
显然,二分图的匹配只能是从一端的节点连向另一端。所以我们考虑如下建模:
- 建立一个超级源点,向左端的所有点连流量为 (1) 的边;
- 原来二分图中的边用从左端点向右端点的边代替,流量为 (1)(事实上无穷大也可以);
- 再建立一个超级汇点,所有右端点向其连流量为 (1) 的边。
比如:
易得这样的网络流一定等于最大匹配。同时,新的边数、点数与原来的均同阶,所以复杂度与普通网络流相同。
特别地,用 Dinic 可以收获 (mathcal{O}(nsqrt{m})) 的优秀复杂度。但我不会证
匈牙利
刚刚的网络流算法固然很优秀,但是码量还是很大的。所以我们考虑一种改进。
首先我们可以得出如下结论:
引理 ( ext{I}):每一次网络流增广路贡献最多为 (1)。
这是显然的。因为边权最大只有 (1)。
引理 ( ext{II}):每个点最多只会被增广一次。
这也是显然的,根据匹配的定义可得。
引理 ( ext{III}):每一次增广路的路径必然是从没有被匹配的边开始,交错匹配的边,最后结束于没有匹配的边。
我们根据网络流增广的操作也可以得到。显然从左到右必然是未跑满流的边(也就是未匹配),而从右往左则一定是匹配过的边(否则没有反向边权)。
综上,我们考虑一种退化的网络流:每次增广也找增广路,但却是从每个节点只找一次(( ext{II})),找到交错的未匹配的边和匹配的边(( ext{III})),然后反转匹配情况。这就是匈牙利算法的整体流程。
由于各种原因,匈牙利算法的复杂度优于普通网络流。增广用 dfs 实现,则整体为 (mathcal{O}(n(n+m))sim mathcal{O}(nm))。而且——和网络流一样——基本跑不满。