1. 刚开始的波形不太对,比如如下代码
i2c_status = I2C_write( at24c02_write_buf, //pointer to data array
1, //length of data to be transmitted
1, //master or slaver
0x78, //slave address to transmit to
1, //transfer mode of operation
30000 //time out for bus busy
);
但是实际的波形是,把0x78左移了一位,我估计是DSP5509会自动在最后一位加上读写位

所以本次AT24C02的地址是0XA0,那么实际写的应该是0x50
i2c_status = I2C_write( at24c02_write_buf, //pointer to data array
1, //length of data to be transmitted
1, //master or slaver
0x50, //slave address to transmit to
1, //transfer mode of operation
30000 //time out for bus busy
);
2. 最后的综合代码如下
#include <csl.h>
#include <csl_i2c.h>
#include <stdio.h>
#include <csl_pll.h>
#include <csl_gpio.h>
#define BUF_LEN 20
#define AT24C02_WRITE_ADDR 0x50
#define AT24C02_READ_ADDR 0X50
Uint16 i2c_status;
/*锁相环的设置*/
PLL_Config myConfig = {
0, //IAI: the PLL locks using the same process that was underway
//before the idle mode was entered
1, //IOB: If the PLL indicates a break in the phase lock,
//it switches to its bypass mode and restarts the PLL phase-locking
//sequence
12, //PLL multiply value; multiply 24 times
1 //Divide by 2 PLL divide value; it can be either PLL divide value
//(when PLL is enabled), or Bypass-mode divide value
//(PLL in bypass mode, if PLL multiply value is set to 1)
};
/* This next struct shows how to use the I2C API */
/* Create and initialize an I2C initialization structure */
I2C_Setup I2Cinit = {
0, /* 7 bit address mode */
0, /* own address - don't care if master */
30, /* clkout value (Mhz) */
50, /* a number between 10 and 400*/
0, /* number of bits/byte to be received or transmitted (8)*/
0, /* DLB mode on*/
1 /* FREE mode of operation on*/
};
Uint16 at24c02_write_buf[3] ={0x00,0x00,0x00};
Uint16 test_write_buf[BUF_LEN+1] = {0};
I2C_Config testI2C;
void delay(Uint32 k)
{
while(k--);
}
void main(void)
{
unsigned char i= 0;
i2c_status = 1;
/*初始化CSL库*/
CSL_init();
/*设置系统的运行速度为140MHz*/
PLL_config(&myConfig);
/*确定方向为输出*/
GPIO_RSET(IODIR,0xFF);
GPIO_RSET(IODATA,0x00);
/*I2C is undet reset*/
I2C_RSET(I2CMDR,0);
/*设置预分频寄存器,I2C的mode clock is 10MHz*/
delay(100);
I2C_RSET(I2CSAR,0x001A);
I2C_RSET(I2CMDR,0x0620);
I2C_setup(&I2Cinit);
/*设置I2C的Mater clock*/
I2C_RSET(I2CCLKL,100);
I2C_RSET(I2CCLKH,100);
I2C_getConfig(&testI2C);
//
for(i=0;i<BUF_LEN;i++)
{
at24c02_write_buf[0] = i;
at24c02_write_buf[1] = 5+i;
i2c_status = I2C_write( at24c02_write_buf, //pointer to data array
2, //length of data to be transmitted
1, //master or slaver
AT24C02_WRITE_ADDR, //slave address to transmit to
1, //transfer mode of operation
30000 //time out for bus busy
);
delay(100);
}
for(i=0;i<BUF_LEN;i++)
{
at24c02_write_buf[0] = i;
at24c02_write_buf[1] = 0;
test_write_buf[i] = 0;
i2c_status = I2C_write( at24c02_write_buf, //pointer to data array
1, //length of data to be transmitted
1, //master or slaver
AT24C02_WRITE_ADDR, //slave address to transmit to
1, //transfer mode of operation
30000 //time out for bus busy
);
i2c_status = I2C_read( &(test_write_buf[i]), //pointer to data array
1, //length of data to be transmitted
1, //master or slaver
AT24C02_READ_ADDR, //slave address to transmit to
1, //transfer mode of operation
30000, //time out for bus busy
0
);
delay(1000);
}
while(1);
}
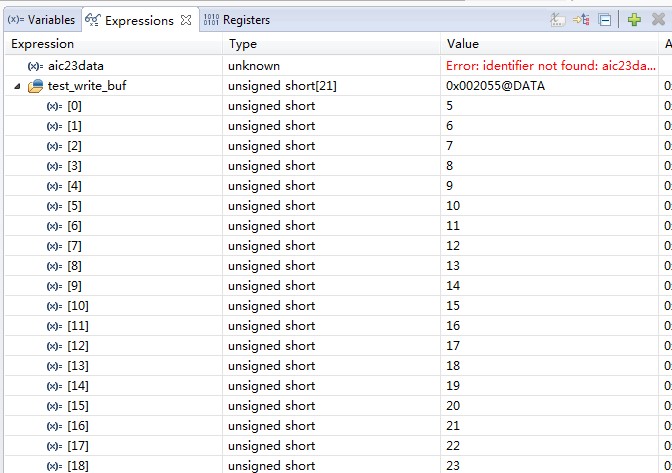
3. 看下仿真的结果
4. 看下写数据的波形

读数据的波形

