实时采样得到的数据经过模糊化处理后输入机器,通过查询模糊规则表便可得到应有的输出模糊量,从而避免了近似推理过程。实际应用中,特别是在控制系统较为简单而采用单片机控制时,常常采用这种查表法。
模糊控制表的计算有多种方式,手工编程计算会很繁琐。MATLAB中提供了evalfis函数进行模糊推理计算,也可以用SystemTest自动生成模糊控制表。注意MATLAB 2016a以后不再包含这个功能,可以用Unit Test Framework或Simulink Test代替。
以双输入—单输出系统为例,计算模糊控制器的查询表。假设控制器输入为误差e和误差变化率ec,输出为控制量u,其基本论域分别为[emin,emax],[ecmin,ecmax],[umin,umax],对应的语言变量E、EC和U的论域为{-6,-5,…,-1,0,1,…,5,6},E、EC和U都选7个语言值{NB,NM,NS,Z,PS,PM,PB},各语言值的隶属函数采用三角函数。其分布可用表1表示,控制规则如表2所示。
表1 语言变量E、EC和U的赋值表

表2 模糊控制规则表

1. 在MATLAB中输入fuzzy打开模糊控制工具箱,编辑输入输出变量的隶属度函数和模糊控制规则,然后将模糊推理系统保存为test.fis。
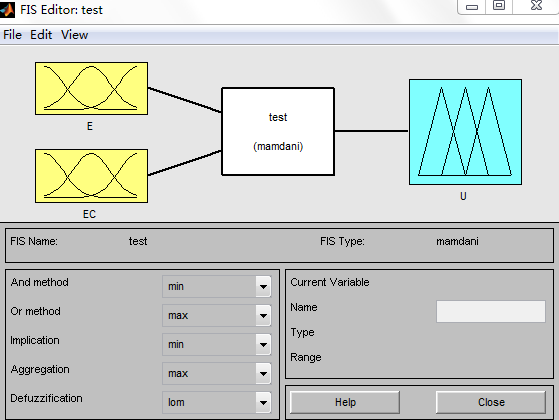
解模糊用(最大隶属度) 最大值法(lom)。如果在模糊集合的论域上,有多个点u的隶属度都取最大值,可取这些点中坐标绝对值最大的点ulom作为模糊集合的代表点,这个方法称为最大隶属度最大值法。
输入输出量的隶属度函数均采用三角形函数,如下图所示:

并根据模糊控制规则表在Rule Editor中逐条添加规则:

2. 打开Simulink模块,建立下图所示的系统框图。添加两个输入和一个输出端口,处理模块是Fuzzy Logic Controller (或Fuzzy Logic Controller with Ruleviewer)。
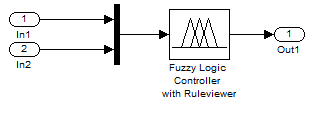
在MATLAB命令窗口中输入fuzzy_control=readfis(‘test’)将之前建立的模糊控制器加载到工作空间,将Simulink中模糊控制模块的参数设置为fuzzy_control,保存该模型为fuzzy_model.mdl。

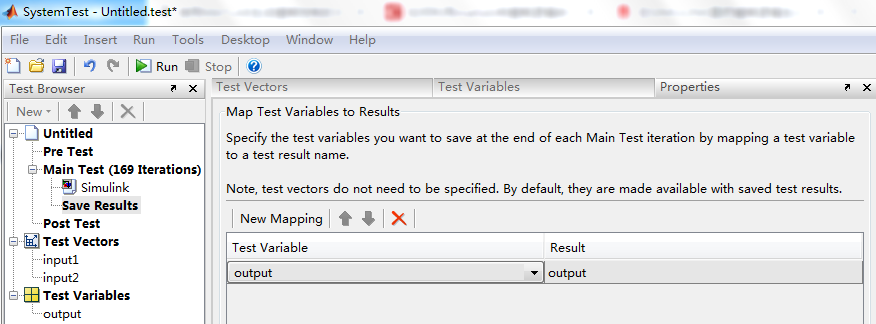
3. 在Simulink界面菜单栏的Tools下拉菜单中找到SystemTest,打开测试界面。选中Main Test,菜单栏 Insert→Test Element → Simulink,选择第二步中建立的模型 fuzzy_model 。

在Test Vectors 项里添加两个测试向量(点击New新建):变量名分别为input1和input2,编辑两个输入变量的取值范围为[-6:1:6],根据输入向量维度测试会循环169次;在Test Variables 里定义测试变量,变量名为output。

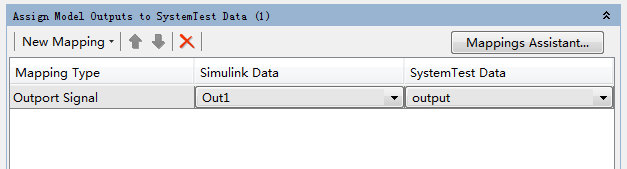
接下来进行变量映射。把测试向量input1、input2分别映射到模糊控制器的输入口In1、In2,做为输入测试信号。把测试变量output 映射到模糊控制器输出口Out1。设置后的界面如下图所示。

最后选择要保存的测试数据。在测试界面点Save Results项,设置如下:
4. 点击Run运行测试,Main Test会进行169次迭代,等待测试结束。
测试成功结束后,可以查看测试结果数据集:

系统测试结果保存在 stresults.ResultsDataSet.output 中,为169*1 cell的单元数组(cell为 [n*1 double] 结构,表示系统被测试了n次)。在matlab中输入下面的命令,将第6次测试结果保存在变量table_data中。
test_data=stresults.ResultsDataSet.output;
temp=zeros(169,1);
for i=1:169
temp(i)=test_data{i}(6);
end
table_data=reshape(a,13,13);
Workspace窗口中右击table_data变量,选择Open Selection可以查看模糊控制查询表:
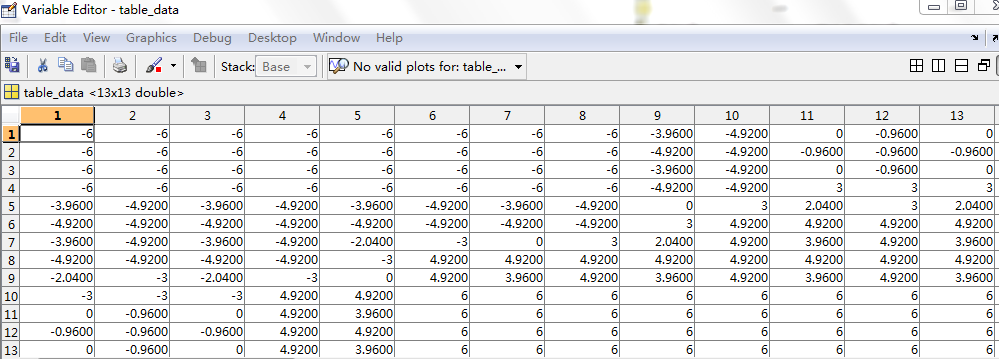
SystemTest还提供了图形化的结果查看功能。在系统测试界面点Tools→Test Results Viewer,点工具栏里的Surf Plot绘制三维曲面。X、Y 、Z分别设置为input1、input2和output。点Plot按钮,根据输入输出绘制的曲面如下图所示:

在这里也可以输出控制表:右击输出变量output,在弹出的菜单中点击Export输出到工作空间中。

output包含6个13X13的二维表,我们列出第六个:

输入table=output(:,:,6); 生成table变量后点击Open Selection查看模糊控制表:

5. 使用evalfis函数也可以根据给定输入计算模糊系统的输出。例如下面的语句计算模糊系统test在E=6,EC=3时的输出,可以看到结果与上面模糊控制查询表中的一致。
fuzzy_control = readfis('test');
evalfis([-6 3], fuzzy_control)
ans =
-4.9200
evalfis也可以同时计算多组输入的结果,比如:
evalfis([-3 6;-2 6],fuzzy_control)
ans =
3.0000
2.0400
参考: