下面这个例子将展示用actionlib来计算随机变量的均值和标准差。首先在action文件中定义goal、result和feedback的数据类型,其中goal为样本容量,result为均值和标准差,feedback为样本编号、当前样本数据、均值和标准差。
#goal definition int32 samples --- #result definition float32 mean float32 std_dev --- #feedback int32 sample float32 data float32 mean float32 std_dev
按照之前例程中的步骤修改CMakeLists.txt后进行编译,生成相关的消息文件和头文件。
Writing a Simple Server
参考 C++ SimpleActionServer 文档,SimpleActionServer类的构造函数有多种重载形式:
SimpleActionServer (std::string name, ExecuteCallback execute_callback, bool auto_start) SimpleActionServer (std::string name, bool auto_start) SimpleActionServer (ros::NodeHandle n, std::string name, ExecuteCallback execute_callback, bool auto_start) SimpleActionServer (ros::NodeHandle n, std::string name, bool auto_start)
在Writing a Simple Action Server using the Execute Callback的例子中,SimpleActionServer就使用了上面第3种构造函数,参数为节点句柄、action名称以及ExecuteCallback回调函数。在本例中没有使用这种来创建action server,而是在action server创建后通过注册 goal callback 和 preempt callback这两个回调函数来处理事件。
void registerGoalCallback (boost::function< void()> cb) // Allows users to register a callback to be invoked when a new goal is available void registerPreemptCallback (boost::function< void()> cb) // Allows users to register a callback to be invoked when a new preempt request is available
服务端代码averaging_server.cpp如下:
#include <ros/ros.h> #include <std_msgs/Float32.h> #include <actionlib/server/simple_action_server.h> // actionlib/server/simple_action_server.h is the action library used from implementing simple actions #include <actionlib_tutorials/AveragingAction.h> // This includes action message generated from the Averaging.action file class AveragingAction { public: AveragingAction(std::string name) : as_(nh_, name, false), action_name_(name) { //register the goal and feeback callbacks as_.registerGoalCallback(boost::bind(&AveragingAction::goalCB, this)); as_.registerPreemptCallback(boost::bind(&AveragingAction::preemptCB, this)); //subscribe to the data topic of interest sub_ = nh_.subscribe("/random_number", 1, &AveragingAction::analysisCB, this); as_.start(); } ~AveragingAction(void) { } void goalCB() { // reset helper variables data_count_ = 0; sum_ = 0; sum_sq_ = 0; // accept the new goal goal_ = as_.acceptNewGoal()->samples;
// acceptNewGoal: Accepts a new goal when one is available. The status of this goal is set to active upon acceptance, and the status of any previously active goal is set to preempted } void preemptCB() { ROS_INFO("%s: Preempted", action_name_.c_str()); // set the action state to preempted as_.setPreempted(); } void analysisCB(const std_msgs::Float32::ConstPtr& msg) { // make sure that the action hasn't been canceled if (!as_.isActive()) return; data_count_++; feedback_.sample = data_count_; feedback_.data = msg->data; //compute the std_dev and mean of the data sum_ += msg->data; feedback_.mean = sum_ / data_count_; sum_sq_ += pow(msg->data, 2); feedback_.std_dev = sqrt(fabs((sum_sq_/data_count_) - pow(feedback_.mean, 2))); as_.publishFeedback(feedback_); if(data_count_ > goal_) { result_.mean = feedback_.mean; result_.std_dev = feedback_.std_dev; if(result_.mean < 5.0) { ROS_INFO("%s: Aborted", action_name_.c_str()); //set the action state to aborted as_.setAborted(result_); } else { ROS_INFO("%s: Succeeded", action_name_.c_str()); // set the action state to succeeded as_.setSucceeded(result_); } } } protected: ros::NodeHandle nh_; actionlib::SimpleActionServer<actionlib_tutorials::AveragingAction> as_; std::string action_name_; int data_count_, goal_; float sum_, sum_sq_; actionlib_tutorials::AveragingFeedback feedback_; actionlib_tutorials::AveragingResult result_; ros::Subscriber sub_; }; int main(int argc, char** argv) { ros::init(argc, argv, "averaging"); AveragingAction averaging(ros::this_node::getName()); ros::spin(); return 0; }
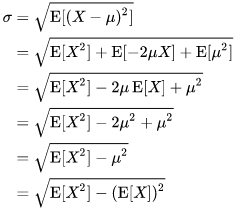
程序中标准差是根据下面的公式计算的:
服务端程序会订阅/random_number话题,并执行回调函数analysisCB。注意在消息回调函数的开头会调用SimpleActionServer类中的isActive()来检测goal的状态,如果不是处于active状态(The goal is currently being processed by the action server)则退出程序,直到客户端发起请求,goal开始被server处理。
Goals请求由ActionClient发出,ActionServer接收后会创建一个有限状态机来跟踪goal的状态:

goal状态的转变主要由server端程序发起,可以使用下面一系列的命令:
-
setAccepted - After inspecting a goal, decide to start processing it
-
setRejected - After inspecting a goal, decide to never process it because it is an invalid request (out of bounds, resources not available, invalid, etc)
-
setSucceeded - Notify that goal has been successfully processed
-
setAborted - Notify that goal encountered an error during processsing, and had to be aborted
-
setCanceled - Notify that goal is no longer being processed, due to a cancel request
客户端也能异步发起状态转变:
-
CancelRequest: The client notifies the action server that it wants the server to stop processing the goal.
状态机有下面多种状态:
中间状态:
-
Pending - The goal has yet to be processed by the action server
-
Active - The goal is currently being processed by the action server
-
Recalling - The goal has not been processed and a cancel request has been received from the action client, but the action server has not confirmed the goal is canceled
-
Preempting - The goal is being processed, and a cancel request has been received from the action client, but the action server has not confirmed the goal is canceled
最终状态:
-
Rejected - The goal was rejected by the action server without being processed and without a request from the action client to cancel
-
Succeeded - The goal was achieved successfully by the action server
-
Aborted - The goal was terminated by the action server without an external request from the action client to cancel
-
Recalled - The goal was canceled by either another goal, or a cancel request, before the action server began processing the goal
-
Preempted - Processing of the goal was canceled by either another goal, or a cancel request sent to the action server
Writing the Data Node
发布随机数节点的代码 gen_numbers.py如下。Python中的random.normalvariate(mu, sigma)函数会返回服从正态分布的随机数,均值为mu,标准差为sigma.
#!/usr/bin/env python import rospy from std_msgs.msg import Float32 import random def gen_number(): pub = rospy.Publisher('random_number', Float32) rospy.init_node('random_number_generator', log_level=rospy.INFO) rospy.loginfo("Generating random numbers") while not rospy.is_shutdown(): pub.publish(Float32(random.normalvariate(5, 1))) rospy.sleep(0.05) if __name__ == '__main__': try: gen_number() except Exception, e: print "done"
注意不要忘记给文件添加可执行权限:
chmod +x gen_numbers.py
Writing a Threaded Simple Action Client
SimpleActionClient的构造函数如下,注意参数spin_thread的设置。如果spin_thread为false则需要自行开启线程。
// Constructs a SingleGoalActionClient actionlib::SimpleActionClient< ActionSpec >::SimpleActionClient ( const std::string & name, bool spin_thread = true ) /* Parameters name: The action name. Defines the namespace in which the action communicates spin_thread: If true, spins up a thread to service this action's subscriptions. If false, then the user has to call ros::spin() themselves. Defaults to True */
客户端程序averaging_client.cpp如下:
#include <ros/ros.h> #include <actionlib/client/simple_action_client.h> // the action library used from implementing simple action clients #include <actionlib/client/terminal_state.h> // defines the possible goal states #include <actionlib_tutorials/AveragingAction.h> // This includes action message generated from the Averaging.action file #include <boost/thread.hpp> // the boost thread library for spinning the thread void spinThread() { ros::spin(); } int main (int argc, char **argv) { ros::init(argc, argv, "test_averaging"); // create the action client actionlib::SimpleActionClient<actionlib_tutorials::AveragingAction> ac("averaging", false); boost::thread spin_thread(&spinThread); // the thread is created and the ros node is started spinning in the background ROS_INFO("Waiting for action server to start."); // Since the action server may not be up and running, the action client will wait for the action server to start before continuing. ac.waitForServer(); ROS_INFO("Action server started, sending goal."); // send a goal to the action actionlib_tutorials::AveragingGoal goal; goal.samples = 100; ac.sendGoal(goal); // The action client now waits for the goal to finish before continuing bool finished_before_timeout = ac.waitForResult(ros::Duration(30.0)); if (finished_before_timeout) { actionlib::SimpleClientGoalState state = ac.getState(); ROS_INFO("Action finished: %s",state.toString().c_str()); } else ROS_INFO("Action did not finish before the time out."); // shutdown the node and join the thread back before exiting ros::shutdown(); spin_thread.join(); //exit return 0; }
下面是boost::thread线程管理的一个例子:
#include <boost/thread.hpp> #include <iostream> void wait(int seconds) { boost::this_thread::sleep(boost::posix_time::seconds(seconds)); } void thread() { for (int i = 0; i < 5; ++i) { wait(1); std::cout << i << std::endl; } } int main() { boost::thread t(thread); t.join(); return 0; }
上述示例中的变量t 一旦被创建,该thread()函数就在其所在线程中被立即执行。为了防止程序终止,就需要对新建线程调用 join() 方法。 join() 方法是一个阻塞调用:它可以暂停当前线程,直到调用 join() 的线程运行结束。 这就使得main() 函数一直会等待到 thread() 运行结束。程序输出如下图所示,如果没有用join方法,则会直接退出。
Running an Action Server and Client with Other Nodes
运行server:
rosrun actionlib_tutorials averaging_server
运行随机数发生器节点:
rosrun actionlib_tutorials gen_numbers.py
运行client:
rosrun actionlib_tutorials averaging_client
计算平均数时查看feedback:
rostopic echo /averaging/feedback
参考: