runxinzhi.com
首页
百度搜索
ROS(机器视觉)
通过ROS打开摄像头
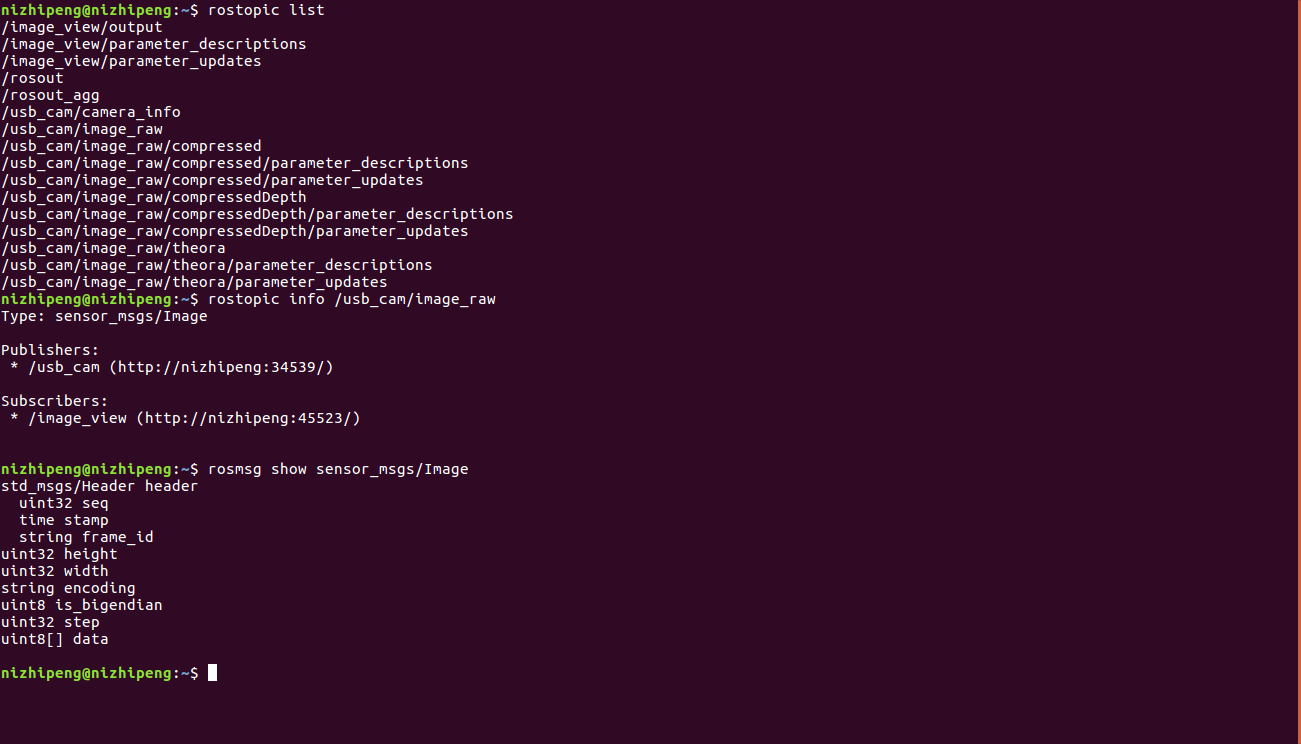
查看话题信息和消息
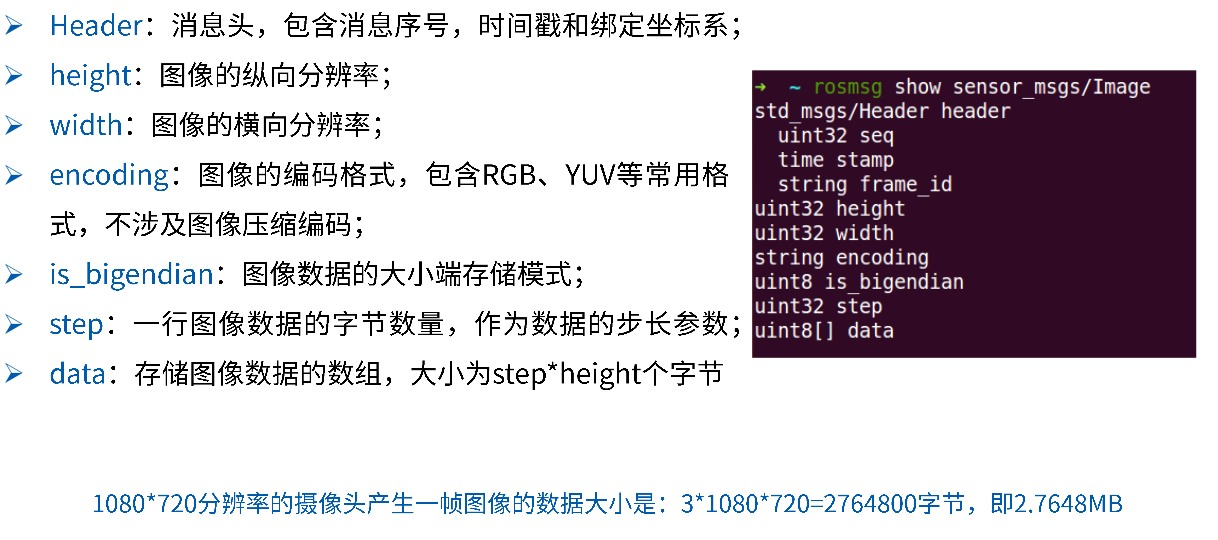
图像数据:
默认调用笔记本自带摄像头,如需调用外接摄像头,需要将其中video0改成video1。
相关阅读:
Jira 8.5.1 安装教程
Postgres 10.11安装教程
SonarQube 7.7 安装教程
Apollo基于K8S的部署以及接入
Nexus 安装教程
Drone 安装教程
Harbor 安装教程
Gitlab 11.9.1 高可用教程
Gitlab 11.9.1 安装教程
大明的FAQ
原文地址:https://www.cnblogs.com/112358nizhipeng/p/9534536.html
最新文章
对象到对象映射-AutoMapper
分布式日志-ExceptionLess
简单易用的.NET免费开源RabbitMQ操作组件EasyNetQ
ASP.NET Core 依赖注入-集成 Autofac
.NET之Hangfire快速入门和使用
.netCore 引用第三方ORM中间件-Dapper
NetCore读取配置文件,简单实现。
C#字符串、字符串数组、字节、字节数组和16进制,8进制,2进制相互转换 及数字和ASCII码互转
React npm ERR! code ELIFECYCLE
Tcp/ip及Udp编程之Socket.Core 开源框架---如何理解TCP粘包原理及解决方案
热门文章
一步步操作mongoDB,增删改查,分页查询 C#
SignalR 简易聊天室+SignalR如何跨域
C# windows服务定时执行
C# 创建windows服务 并通过winform 程序控制服务的 安装 启动 停止 卸载
Ambari仓库安装教程
基于Docker的MySql
利用Docker搭建开发环境
Dokuwiki安装教程
Archery安装教程
.Net Core单元测试规范
Copyright © 2020-2023
润新知