MXNET Windows 编译安装(Python)
本文只记录Mxnet在windows下的编译安装,更多环境配置请移步官方文档:http://mxnet.readthedocs.io/en/latest/how_to/build.html
编译目标:
- libmxnet.dll
必要条件:
- 支持C++11,g++>=4.8
- BLAS库, 比如 libblas, libblas, openblas intel mkl
可选条件:
- CUDA Toolkit >= v7.0 to run on nvidia GPUs
- Requires GPU with support for Compute Capability >= 2.0
- CUDNN to accelerate the GPU computation (only CUDNN 3 is supported)
- opencv for image augmentation
Steps
首先,强化VS2013,使之能支持C++11特性。
- 下载安装: Visual C++ Compiler Nov 2013 CTP.
- 将安装目录下的文件拷贝至VS2013相应安装目录下,例如: 将C:Program Files (x86)Microsoft Visual C++ Compiler Nov 2013 CTP下所有文件拷贝到 C:Program Files (x86)Microsoft Visual Studio 12.0VC 最好将原来的文件备份。
其次,安装第三方库。
包括 OpenCV, CuDNN and OpenBlas(如果已经安装 MKL,则忽略此项).
最后,使用CMake来创建VS工程,CMake需要预先安装。
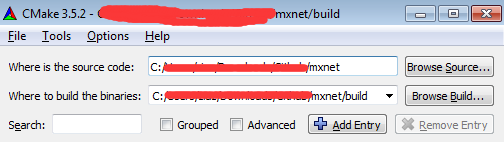
注意,应该根据自己机器选择是否为Win64,否则配置openCV时,会找不到cuBLAS.
点击configure之后,需要配置openCV、openBLAS和cuDNN路径,按提示next即可。
提示Configure done后,点击Generate生成解决方案。
提示Generate done后,在VS里打开解决方案进行编译。
如果提示opencv2/opencv.hpp找不到,则在项目属性的VC++中,在包含目录添加该文件目录(在opencv安装目录中可找到)即可,类似问题都如此解决。
Python Package Installation
需要 python>=2.7 和 numpy. 在windows命令行中使用pip命令安装numpy即可:
pip install numpy
检验是否安装成功:
python example/image-classification/train_mnist.py
安装(即将所需库文件放到指定位置):
cd python;
python setup.py install
或者设置环境变量 PYTHONPATH 为/<RootPathToProject>/mxnet/python
Train MLP on MNIST
现在训练一个MLP来简单了解下训练一个网络的过程以及相关Python接口。
import mxnet as mx # step 1 配置训练集 train = mx.io.MNISTIter( image = "mnist/train-images-idx3-ubyte", label = "mnist/train-labels-idx1-ubyte", batch_size = 128, data_shape = (784, )) # step 2 配置验证集 val = mx.io.MNISTIter( image = "mnist/t10k-images-idx3-ubyte", label = "mnist/t10k-labels-idx1-ubyte", batch_size = 128, data_shape = (784, )) # step 3 配置网络,此处简单的三层 data = mx.symbol.Variable('data') fc1 = mx.symbol.FullyConnected(data = data, num_hidden=128) act1 = mx.symbol.Activation(data = fc1, act_type="relu") fc2 = mx.symbol.FullyConnected(data = act1, num_hidden = 64) act2 = mx.symbol.Activation(data = fc2, act_type="relu") fc3 = mx.symbol.FullyConnected(data = act2, num_hidden=10) mlp = mx.symbol.SoftmaxOutput(data = fc3, name = 'softmax') # step 4 前馈网络配置 model = mx.model.FeedForward( symbol = mlp, num_epoch = 20, learning_rate = .1) # step 5 拟合 model.fit(X = train, eval_data = val) # step 6 训练完成后,利用训练好的模型进行预测 model.predict(X = val)
填坑~~