二分图的最小点覆盖,又是一个二分图中非常经典的问题。
例题
原创例题
题目描述
给定一个二分图,结点个数分别为n,m,边数为e,求二分图最大匹配数。
输入格式
第一行,n, m, e。
第二至(e + 1)行,每行两个正整数u, v,表示u, v有一条连边。
输出格式
第一行,二分图最小点覆盖数。
第二行,输出一种最小点覆盖方案的左侧点集,元素与元素之间用一个空格分开。
第三行,输出一种最小点覆盖方案的右侧点集,元素与元素之间用一个空格分开。
输入输出样例
输入
4 4 7
1 1
1 3
2 2
2 3
2 4
3 2
4 2
输出
3
1 2
2
说明/提示
1 <= n, m <= 1000, 1 <= e <= n * m。
二分图最小点覆盖——Konig定理
先说一下什么叫二分图的最小点覆盖,简而言之就是我们希望用尽可能少的点去使所有的边都被选中,这里解释一下:如果说一条边的任意一个顶点被选中那么这条边也被选中。举个例子。
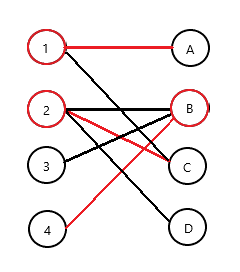
其中的红色边为最大匹配选中的匹配边,红色点为最小点覆盖选中的点,我们可以看到任何一条边都包含一个红点,这就是二分图的最小点覆盖。
现在再来说一下Konig定理:二分图中,最小点覆盖数 = 最大匹配数。
这里我们先来了解一下最小点覆盖的点是如何选择的呢?第一步先做最大匹配,之后我们每次从左边不在匹配边中的一个点开始去按照:未匹配边 -> 匹配边 -> 未匹配边 -> 匹配边 …… 匹配边与未匹配边交替选择的顺序,标记途中经过的顶点,则最后一条经过的边必定为匹配边。这里我开了两个数组vx和vy分别记录每个左侧点是否被标记和每个右侧点是否被标记,上面的例子中3、4、B被标记,但务必牢记最后最小点覆盖的点集并不是这些点组成的集合,而是左侧未被标记的点和右侧被标记的点组成的集合S才是最终答案,例子中为1、2、B。
证明(这里假设选出来的点集为P,最大匹配边的边集为E):
-
P覆盖了所有边:(反证法)我们假设有一条边左右两端点均不在P集合中,则左端点被标记,右端点未被标记。分类讨论,如果说当前边不在边集E中,则左端点为未被匹配点,又因为当前边不是匹配边,所以必然会从左端点沿当前边开始标记,那么右端点必然被标记,矛盾。如果说当前边在边集E中,其左端点被标记,那么必然是通过右端点链接过来的,则右端点被标记,矛盾。综上,我们可以知道点集P覆盖了所有边。
-
|P| = |E|:我们知道点集P中的左侧点都是匹配点,而右侧点也都为匹配点,又因为一条匹配边上左侧点和右侧点不可能同时在或者不在点集P中,那么E集合中任意一条边左右两端点中都恰好仅有一个点在点集P中,所以|P| = |E|。
-
|P| 是最小的点覆盖数:|P| = 最大匹配数,如果另一个点集的元素个数比|P|更小,那么这个点集必然无法包含所有的匹配边,连所有的匹配边都无法全部包含,怎么可能包含所有边呢。所以|P| 是最小的点覆盖数。
其实求二分图的最小点覆盖数,就是求其二分图的最大匹配数。如果是找最小点覆盖的点的话,就按照上面的思路模拟就行了。
最后,算一下算法时间复杂度:其实就是匈牙利算法的时间复杂度,O(n * m)。
代码
# include <cstdio>
# include <algorithm>
# include <cmath>
# include <cstring>
# include <vector>
using namespace std;
const int N_MAX = 1000, E_MAX = 1000000;
struct Edge
{
int to, next;
};
int n, m, e;
vector <int> g[N_MAX + 10];
int opp[N_MAX + 10];
bool vis[N_MAX + 10];
bool vx[N_MAX + 10], vy[N_MAX + 10];
void addEdge(int x, int y)
{
g[x].push_back(y);
}
bool find(int x)
{
if (vis[x]) return false;
vis[x] = true;
for (int i = 0; i < (int) g[x].size(); i++) {
int y = g[x][i];
if (opp[y] == 0 || find(opp[y])) {
opp[y] = x;
return true;
}
}
return false;
}
void mark(int x)
{
if (vx[x]) return;
vx[x] = true;
for (int i = 0; i < (int) g[x].size(); i++) {
int y = g[x][i];
if (opp[y] && !vy[y]) {
vy[y] = true;
mark(opp[y]);
}
}
}
int hungary()
{
memset(opp, 0, sizeof(opp));
int ans = 0;
for (int i = 1; i <= n; i++) {
memset(vis, false, sizeof(vis));
ans += find(i);
}
return ans;
}
int konig()
{
int ans = hungary();
memset(vis, false, sizeof(vis));
for (int i = 1; i <= m; i++)
vis[opp[i]] = true;
memset(vx, false, sizeof(vx));
memset(vy, false, sizeof(vy));
for (int i = 1; i <= n; i++)
if (!vis[i]) mark(i);
return ans;
}
int main()
{
scanf("%d%d%d", &n, &m, &e);
for (int i = 1; i <= e; i++) {
int x, y;
scanf("%d%d", &x, &y);
addEdge(x, y);
}
printf("%d
", konig());
for (int i = 1; i <= n; i++)
if (!vx[i]) printf("%d ", i);
puts("");
for (int i = 1; i <= m; i++)
if (vy[i]) printf("%d ", i);
puts("");
return 0;
}