作业抬头(1')
| 项目 | 内容 |
|---|---|
| 这个作业属于哪个课程 | 2020春季计算机学院软件工程(罗杰 任健) |
| 这个作业的要求在哪里 | 个人项目作业 |
| 我在这个课程的目标是 | 了解软件工程的技术,掌握工程化开发的能力 |
| 这个作业在哪个具体方面帮助我实现目标 | 初步学习掌握测试和效能分析等工具 |
| 教学班级 | 006 |
| 项目地址 | https://github.com/Reliacrt/IntersectionSolution.git |
解题思路描述。即刚开始拿到题目后,如何思考,如何找资料的过程。(3')
本次作业需要求交点的个数,所以我采取的办法是计算出所有的交点并插入一个集合中,最后输出集合内元素的个数。
所以查找了直线直线交点、直线圆交点、圆圆交点的计算方法,具体的计算方法由代码说明一节给出。
设计实现过程。设计包括代码如何组织,比如会有几个类,几个函数,他们之间关系如何,关键函数是否需要画出流程图?单元测试是怎么设计的?(4')
类说明
- Point类:用来保存计算得到的交点结果,并重载了比较相关操作符,便于使用set容器
- Shape类:Line和Circle的基类,用来提供统一的抽象接口intersect
- Line : Shape类:Shape的子类,用来描述直线
- Circle : Shape类:Shape的子类,用来描述圆
函数说明(关键)(intersect接口背后使用的函数)
以下三个函数返回值都是vector<Point>:
- line_inter_line(Shape*, Shape*):直线与直线交点函数
- line_inter_circle(Shape*, Shape*):直线与圆交点函数
- circle_inter_circle(Shape*, Shape*):圆与圆交点函数
类、函数关系说明
为避免重复代码,子类对intersect接口的实现统统调用的上述三个函数,在Shape类中保留类型字段用以区分Line还是Circle,然后分派到不同的函数。
关键函数流程由数学计算的方法给出。
单元测试设计
由于子类的成员函数的实现都是通过的上述三个关键函数,所以单元测试就针对上述三个函数写了三个单元测试:
- 线线:分别测试相交一点和不相交的情况 (4个测试用例)
- 线圆:分别测试相交两点、相切和不相交的情况 (4个测试用例)
- 圆圆:分别测试相交两点、相切和不相交的情况 (3个测试用例)
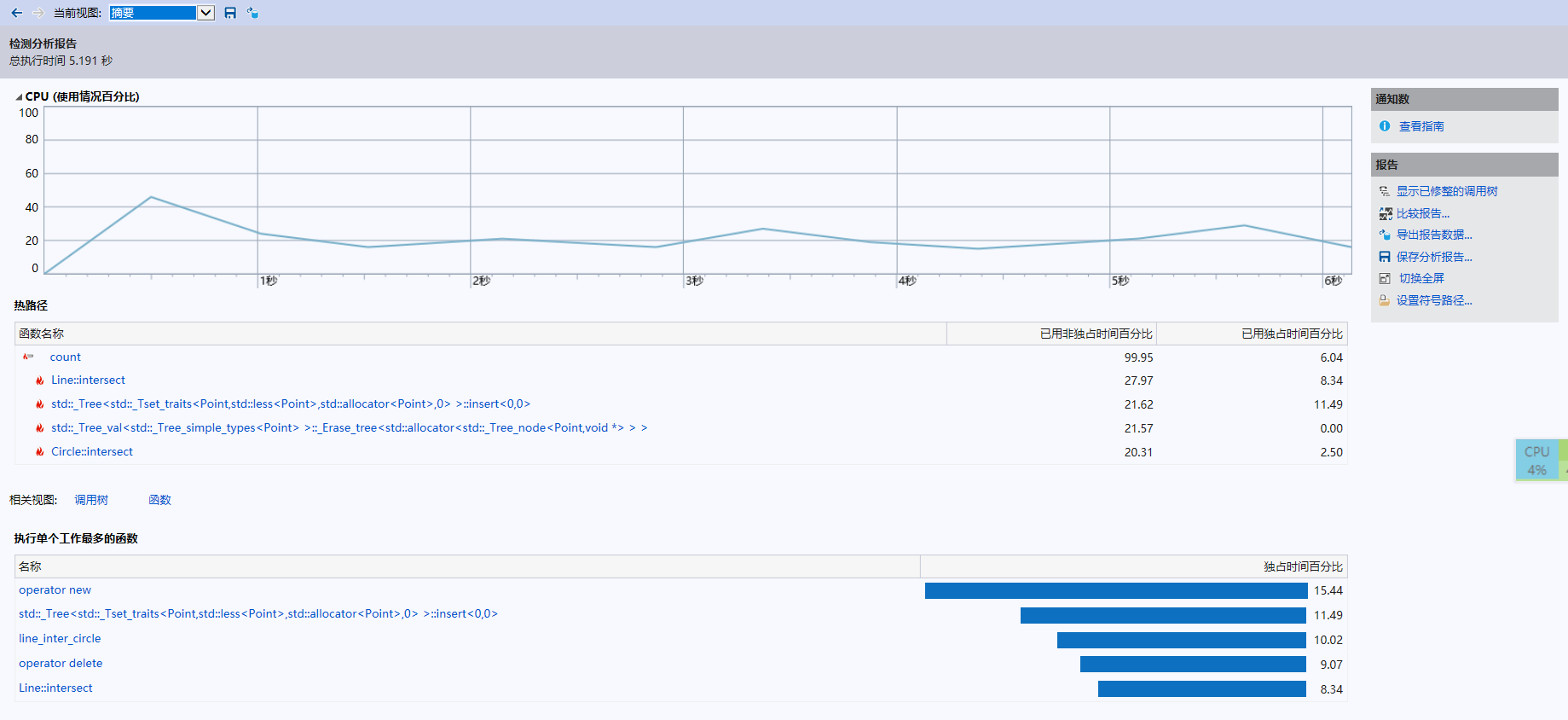
记录在改进程序性能上所花费的时间,描述你改进的思路,并展示一张性能分析图(由 VS 2019 的性能分析工具自动生成),并展示你程序中消耗最大的函数。(3')
性能分析图
函数运行时间
| 函数名 | 调用数 | 已用非独占时间百分比 | 已用独占时间百分比 | 平均已用非独占时间 |
|---|---|---|---|---|
| performance | 1 | 100 | 0.02 | 5,190.55 |
| __scrt_common_main_seh | 1 | 100 | 0 | 5,190.67 |
| main | 1 | 100 | 0 | 5,190.57 |
| mainCRTStartup | 1 | 100 | 0 | 5,190.67 |
| count | 1 | 99.95 | 6.04 | 5,188.20 |
| line_inter_circle | 338,605 | 35.5 | 10.02 | 0.01 |
| Line::intersect | 239,418 | 27.97 | 8.34 | 0.01 |
| std::_Tree::insert | 533,463 | 21.62 | 11.49 | 0 |
| std::_Tree_val::_Erase_tree | 533,463 | 21.57 | 7.25 | 55.98 |
| Circle::intersect | 260,082 | 20.31 | 2.5 | 0 |
| operator delete | 1,066,945 | 18.33 | 3.43 | 0 |
| std::vector::_Emplace_reallocate | 533,463 | 16.81 | 3.09 | 0 |
| operator new | 1,156,991 | 15.44 | 15.44 | 0 |
| operator delete | 1,066,945 | 14.9 | 9.07 | 0 |
| __security_check_cookie | 598,690 | 7.34 | 7.34 | 0 |
| std::_Tree_val::_Insert_node | 533,463 | 7.31 | 7.31 | 0 |
| _free | 1,066,945 | 5.83 | 5.83 | 0 |
| sqrt<int,void> | 338,605 | 2.81 | 2.81 | 0 |
| rand | 6,000 | 0.01 | 0.01 | 0 |
这是采用Instrumentation的方式测试后的函数部分的时间数据,由于是自动选择的标记函数,3个关键函数只标记了line_inter_circle,但是即便只标记了他,也可以从上述数据看出其消耗时间,在计算交点的过程中是最大的,而且后续的插入set消耗的时间更是占了这个程序的20%以上,更小一级的操作符也就是内存分配函数new和delete,也是消耗时间超过了20%,所以这就是3个优化程序运行时间的方向:
- 优化交点的计算:可以通过简化计算过程优化交点计算耗时
- 优化最后统计交点所用的容器:set容器内部使用的红黑树,插入消耗相当大
- 优化中间计算过程所用的容器:中间计算所用的vector不断创建并删除,这是大量的内存分配工作
我觉得我能做的优化只有第三点了,目前只做了基本的将函数内联的操作。
代码说明。展示出项目关键代码,并解释思路与注释说明。(3')
line_inter_line
inline vector<Point> line_inter_line(Shape* s1, Shape* s2)
{
double x, y;
Line* l1 = (Line*)s1;
Line* l2 = (Line*)s2;
vector<Point> ret;
auto a1 = l1->x_coeff, a2 = l2->x_coeff;
auto b1 = l1->y_coeff, b2 = l2->y_coeff;
auto c1 = l1->c_coeff, c2 = l2->c_coeff;
if (a1 * b2 - a2 * b1 != 0)
{
x = ((double)c2 * b1 - (double)c1 * b2) / ((double)a1 * b2 - (double)a2 * b1);
y = ((double)c1 * a2 - (double)c2 * a1) / ((double)a1 * b2 - (double)a2 * b1);
ret.push_back(Point(x, y));
}
return ret;
}
线线交点计算思路
首先直线在内部转化为(Ax+By+C=0)的表示;然后根据线性代数:
可得:
进一步可得:
line_inter_circle
inline vector<Point> line_inter_circle(Shape* s1, Shape* s2)
{
Line* l = (Line*)s1;
Circle* c = (Circle*)s2;
vector<Point> ret;
auto A = l->x_coeff, B = l->y_coeff, C = l->c_coeff;
auto x0 = c->x_coeff, y0 = c->y_coeff, r = c->r_coeff;
const int ssum_a_b = SSUM(A, B);
const double squa_ssum = sqrt(ssum_a_b);
double d = abs(A * x0 + B * y0 + C) / squa_ssum;
if (d > r) return ret;
double x_d = ((double)-A * C + (double)B * B * x0 - (double)A * B * y0) / ssum_a_b;
double y_d = ((double)-B * C - (double)A * B * x0 + (double)A * A * y0) / ssum_a_b;
if (r > d) // 相交于两点
{
double ano_d = sqrt((double)r * r - d * d);
double vec_x = 1.0 * (-B) / squa_ssum;
double vec_y = 1.0 * (A) / squa_ssum;
ret.push_back(Point(x_d + vec_x * ano_d, y_d + vec_y * ano_d));
ret.push_back(Point(x_d - vec_x * ano_d, y_d - vec_y * ano_d));
}
if (r == d) // 相切于一点
{
ret.push_back(Point(x_d, y_d));
}
return ret;
}
线圆交点计算思路
首先确定圆心与直线的距离,采用点到直线距离公式:
然后比较(d)与(r)的大小判断有几个交点:
- (d<r):2个
- (d=r):1个
- (d>r):0个
然后求过圆心与该直线的垂线与该直线的交点(如果上一步判断只有一个交点,则该点即交点,停止计算):
然后根据以上交点和直线方程以及(sqrt{r^2-d^2})求出两交点:
circle_inter_circle
inline vector<Point> circle_inter_circle(Shape* s1, Shape* s2)
{
Circle* c1 = (Circle*)s1;
Circle* c2 = (Circle*)s2;
vector<Point> ret;
auto x1 = c1->x_coeff, y1 = c1->y_coeff, r1 = c1->r_coeff;
auto x2 = c2->x_coeff, y2 = c2->y_coeff, r2 = c2->r_coeff;
auto d_2 = SSUM(x2 - x1, y2 - y1);
auto r_r_2 = SQUA(r1 + r2);
if (r_r_2 >= d_2)
{
Shape* line = new Line(
2 * (x2 - x1),
2 * (y2 - y1),
x1 * x1 - x2 * x2 + y1 * y1 - y2 * y2 - r1 * r1 + r2 * r2);
return line_inter_circle(line, s1);
}
return ret;
}
圆圆交点计算思路
首先确定两圆心的距离:(d = sqrt{(x_1-x_2)^2+(y_1-y_2)^2})
然后比较(d)与(r)的大小判断有几个交点:
- (d<r_1+r_2):2个
- (d=r_1+r_2):1个
- (d>r_1+r_2):0个
然后将两方程相减得到交点的直线方程,转换圆圆交点为线圆交点:
相减得:
将该方程与任意一个圆方程联立采用线圆交点计算即可得结果。
Code Analysis的警告消除
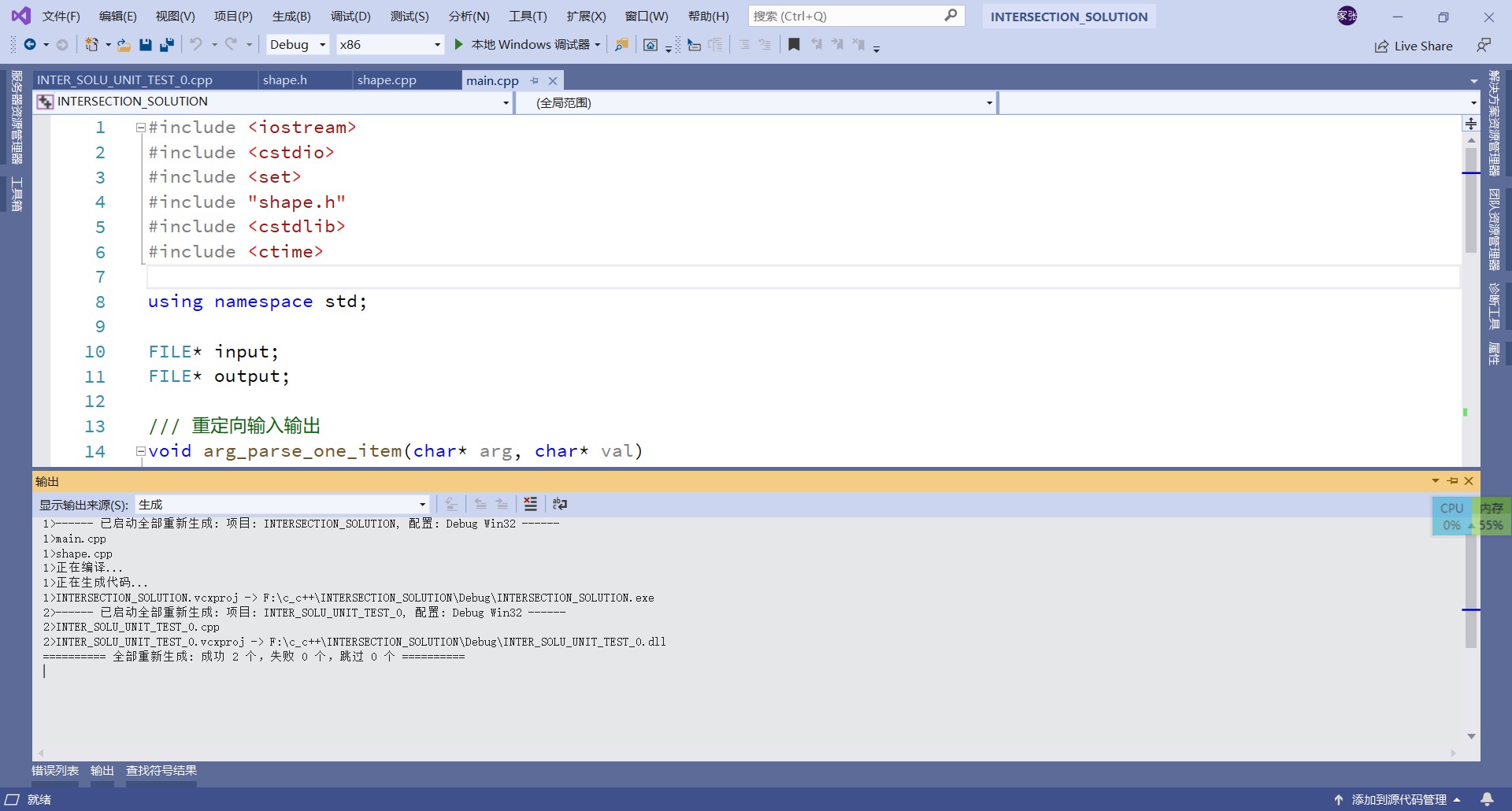
通过输出部分可以看出,两个成功(项目和测试项目),没有错误和警告。
时间花费(1')
| PSP2.1 | Personal Software Process Stages | 预估耗时(分钟) | 实际耗时(分钟) |
|---|---|---|---|
| Planning | 计划 | 10 | 10 |
| · Estimate | · 估计这个任务需要多少时间 | 10 | 10 |
| Development | 开发 | 325 | 410 |
| · Analysis | · 需求分析 (包括学习新技术) | 20 | 30 |
| · Design Spec | · 生成设计文档 | 30 | 30 |
| · Design Review | · 设计复审 (和同事审核设计文档) | ||
| · Coding Standard | · 代码规范 (为目前的开发制定合适的规范) | 15 | 0 |
| · Design | · 具体设计 | 30 | 50 |
| · Coding | · 具体编码 | 120 | 180 |
| · Code Review | · 代码复审 | 30 | 30 |
| · Test | · 测试(自我测试,修改代码,提交修改) | 80 | 90 |
| Reporting | 报告 | 60 | 60 |
| · Test Report | · 测试报告 | 30 | 30 |
| · Size Measurement | · 计算工作量 | 10 | 10 |
| · Postmortem & Process Improvement Plan | · 事后总结, 并提出过程改进计划 | 20 | 20 |
| 合计 | 395 | 480 |
本次项目的收获
主要是学会了VS项目中单元测试的使用和性能探查器的使用(我的电脑CPU Sampling不可用),以及利用Code Analysis消除错误和警告来完善代码。