pcd文件数据举例


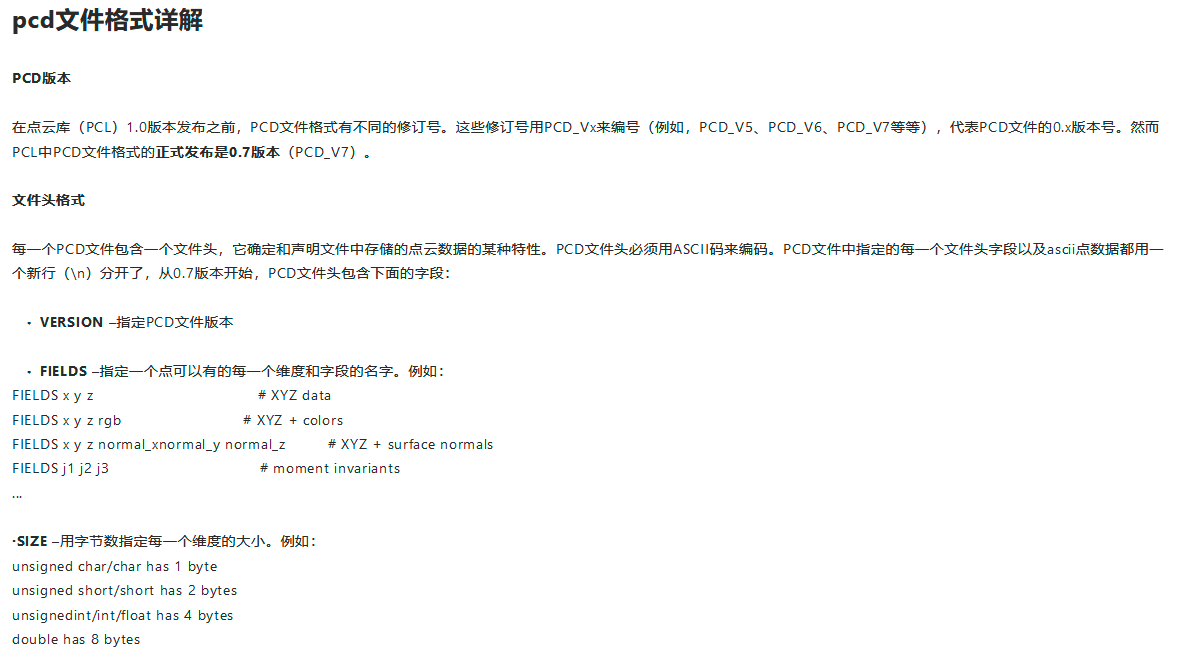
# .PCD v.7 - Point Cloud Data file format VERSION .7 # 版本号 FIELDS x y z rgb # 指定一个点可以有的每一个维度和字段的名字 SIZE 4 4 4 4 # 用字节数指定每一个维度的大小。例如: TYPE F FFF # 用一个字符指定每一个维度的类型 int uint folat COUNT 1 1 1 1 # 指定每一个维度包含的元素数目 WIDTH 640 # 像图像一样的有序结构,有640行和480列, HEIGHT 480 # 这样该数据集中共有640*480=307200个点 VIEWPOINT 0 0 0 1 0 0 0 # 指定数据集中点云的获取视点 视点信息被指定为平移(txtytz)+四元数(qwqxqyqz) POINTS 307200 # 指定点云中点的总数。从0.7版本开始,该字段就有点多余了 DATA ascii # 指定存储点云数据的数据类型。支持两种数据类型:ascii和二进制 0.93773 0.33763 0 4.2108e+06 0.90805 0.35641 0 4.2108e+06
代码:
#include <iostream> #include <pcl/io/pcd_io.h> #include <pcl/point_types.h> int main(int argc, char **argv) { pcl::PointCloud<pcl::PointXYZ> cloud; // Fill in the cloud data cloud.width = 5; cloud.height = 1; cloud.is_dense = false; cloud.points.resize(cloud.width*cloud.height); for (auto &point : cloud) { point.x = 1024 * rand() / (RAND_MAX + 1.0f); point.y = 1024 * rand() / (RAND_MAX + 1.0f); point.z = 1024 * rand() / (RAND_MAX + 1.0f); } pcl::io::savePCDFileASCII("test_pcd.pcd", cloud); std::cerr << "Saved " << cloud.size() << " data points to test_pcd.pcd." << std::endl; for (const auto &point : cloud) { std::cerr << " " << point.x << " " << point.y << " " << point.z << std::endl; } system("pause"); return (0); }


参考:https://www.yuque.com/huangzhongqing/pcl/hl1582