最近在做一个关于电池管理的项目,用到了TI公司的BQ4050,这个IC是专门对电池进行管理、保护和数据采集的,在TI配套的上位机中可以对这个芯片进行配置,具体的配置方法还有各种寄存器的意义可以参照手册,实际上我对怎么配置这个IC也不怎么明白,基本上是按照默认配置来的。不过因为项目中我们用到四串的电池,所以必须配置为4串,不然第四个电池就不能获取到电压。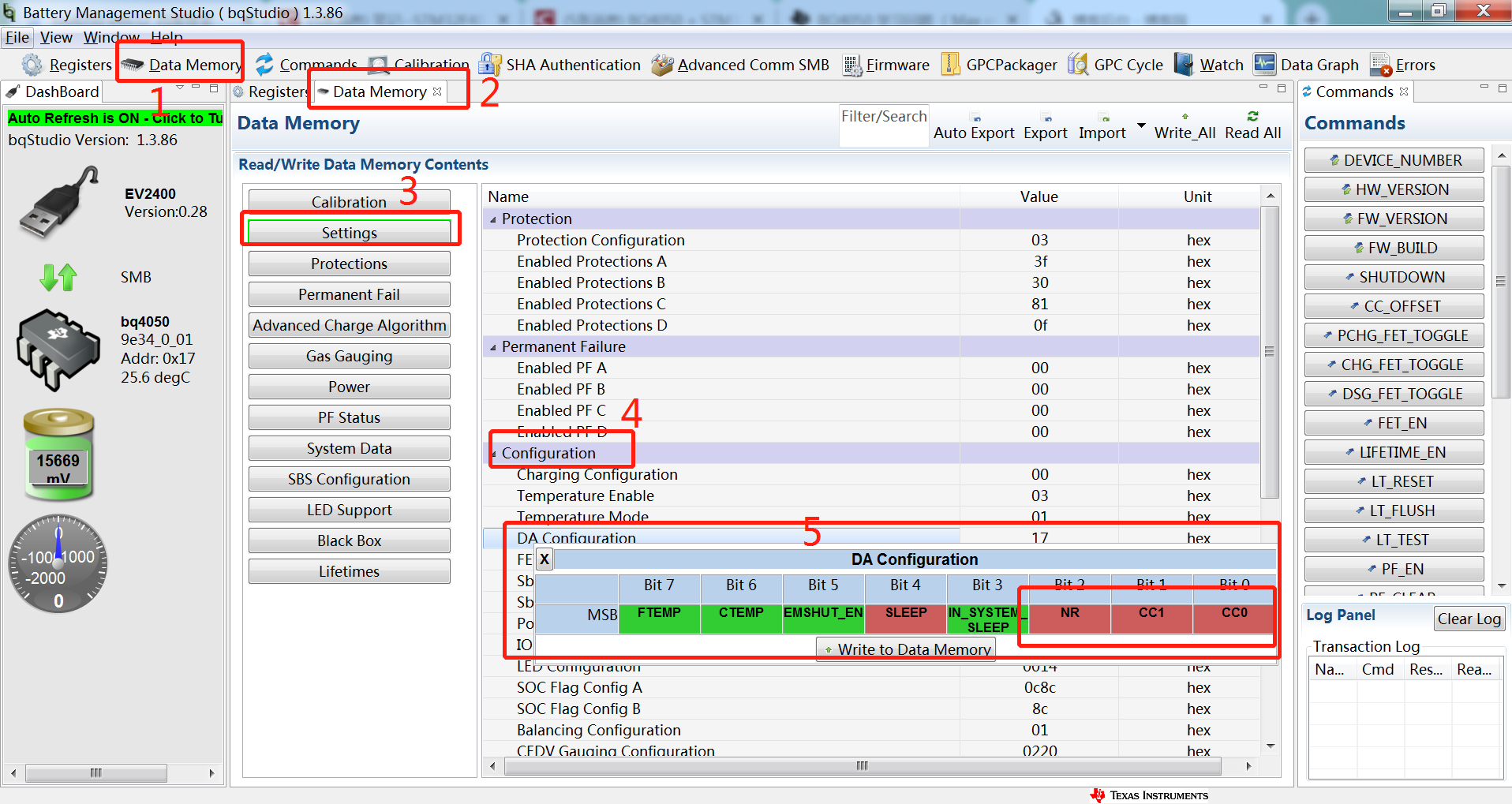
具体的寄存器描述如图:

接下来,我们来说说BQ4050的通讯,BQ4050与单片机的通讯是通过SMBus完成的,刚开始我对这个通讯一无所知,查找了一些资料发现这个通讯跟I2C没有根本上的区别,只是在速率上有些许的区别罢了。I2C的通迅速率:标准:100kHz,快速:400kHz。但是SMBus的速率只在10kHz~100kHz之间。
I2C是飞利浦公司在1980年发明的。stm32为了避开它的专利,把硬件I2C设计得很复杂,通常我们都用模拟I2C来进行通讯,据悉模拟I2C的稳定性要比硬件I2C更高。更重要的一点是模拟I2C可以由普通的IO口进行模拟,所以就可以很自由的选择通讯的时钟线SCL和数据线SDA了。而且网上能找到的例程更多的也是模拟I2C。我这个项目的SMBus通讯也是模拟的,下面是我的SMBus代码片段:
#define I2C_GPIO_Port GPIOB
#define I2C_SCL_Pin (uint16_t)GPIO_PIN_6
#define I2C_SDA_Pin (uint16_t)GPIO_PIN_7
#define SCL_H HAL_GPIO_WritePin(I2C_GPIO_Port,I2C_SCL_Pin,GPIO_PIN_SET)
#define SCL_L HAL_GPIO_WritePin(I2C_GPIO_Port,I2C_SCL_Pin,GPIO_PIN_RESET)
#define SDA_H HAL_GPIO_WritePin(I2C_GPIO_Port,I2C_SDA_Pin,GPIO_PIN_SET)
#define SDA_L HAL_GPIO_WritePin(I2C_GPIO_Port,I2C_SDA_Pin,GPIO_PIN_RESET)
#define READ_SDA HAL_GPIO_ReadPin(I2C_GPIO_Port,I2C_SDA_Pin)
/********************************
*函数名称:void I2C_Pin_Init(void)
*函数功能:I2C管脚初始化
*函数形参:无
*函数返回值:无
*备注:PB6————SCL,PB7————SDA
********************************/
void IIC_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
__HAL_RCC_GPIOB_CLK_ENABLE(); //打开PB组时钟
/*配置SCL==PB6*/
GPIO_InitStruct.Pin = I2C_SCL_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_PULLUP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(I2C_GPIO_Port, &GPIO_InitStruct);
/*配置SDA==PB7*/
GPIO_InitStruct.Pin = I2C_SDA_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_PULLUP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(I2C_GPIO_Port, &GPIO_InitStruct);
SCL_H;
SDA_H;
}
//产生IIC起始信号
void IIC_Start(void)
{
SDA_OUT();
SCL_L;
delay_us(2);
SDA_H;
delay_us(1);
SCL_H;
delay_us(9);
SDA_L;//START:when CLK is high,DATA change form high to low
delay_us(9);
SCL_L;//钳住I2C总线,准备发送或接收数据
}
//产生IIC停止信号
void IIC_Stop(void)
{
SDA_OUT();
SCL_L;
delay_us(1);
SDA_L;
delay_us(9);
SCL_H;
delay_us(9);
SDA_H;//发送I2C总线结束信号
delay_us(9);
}
//等待应答信号到来
//返回值:1,接收应答失败
// 0,接收应答成功
uint8_t IIC_Wait_Ack(void)
{
uint8_t ucErrTime=0;
SDA_IN(); //SDA设置为输入
SDA_H;delay_us(9);
SCL_H;delay_us(9);
while(READ_SDA)
{
ucErrTime++;
if(ucErrTime>250)
{
IIC_Stop();
return 1;
}
}
SCL_L;//时钟输出0
delay_us(2);
return 0;
}
//产生ACK应答
void IIC_Ack(void)
{
SCL_L;
SDA_OUT();
SDA_L;
delay_us(9);
SCL_H;
delay_us(9);
SCL_L;
}
//不产生ACK应答
void IIC_NAck(void)
{
SCL_L;
SDA_OUT();
SDA_H;
delay_us(9);
SCL_H;
delay_us(9);
SCL_L;
}
//IIC发送一个字节
//返回从机有无应答
//1,有应答
//0,无应答
void IIC_Send_Byte(uint8_t txd)
{
uint8_t t;
SDA_OUT();
SCL_L;//拉低时钟开始数据传输
for(t=0;t<8;t++){
if((txd&0x80)>>7)
{
SDA_H;
}
else
{
SDA_L;
}
txd<<=1;
delay_us(8);
SCL_H;
delay_us(8);
SCL_L;
delay_us(8);
}
}
//读1个字节,ack=1时,发送ACK,ack=0,发送nACK
uint8_t IIC_Read_Byte(void)
{
unsigned char i,receive=0;
SDA_IN();//SDA设置为输入
for(i=0;i<8;i++ )
{
SCL_L;
delay_us(12);
SCL_H;
receive<<=1;
if(READ_SDA)receive++;
delay_us(9);
}
return receive;
}
/*
函数:I2C_Write()
功能:向I2C总线写1个字节的数据
参数:
dat:要写到总线上的数据
*/
void I2C_Write(unsigned char dat)
{
/*发送1,在SCL为高电平时使SDA信号为高*/
/*发送0,在SCL为高电平时使SDA信号为低*/
unsigned char t ;
for(t=0;t<8;t++)
{
if(dat & 0x80)
{
SDA_H;
}
else
{
SDA_L;
}
delay_us(10);
SCL_H; //置时钟线为高,通知被控器开始接收数据位
delay_us(10);
SCL_L;
delay_us(10);
dat <<= 1;
}
}
/********************************
*函数名称:void SDA_OUT(void)
*函数功能:SDA线配置为输出
*函数形参:无
*函数返回值:无
********************************/
void SDA_OUT(void)
{
GPIOB->MODER &= ~(3<<(2*7));
GPIOB->MODER |= 1<<(2*7);
}
/********************************
*函数名称:void SDA_IN(void)
*函数功能:SDA线配置为输入
*函数形参:无
*函数返回值:无
********************************/
void SDA_IN(void)
{
GPIOB->MODER &= ~(3<<(2*7));
GPIOB->MODER |= 0<<(2*7);
}
这是实现SMBus通讯的最基础几个功能函数,其中与I2C最大的区别应该就是每个时钟周期都比较长,每次时钟线电平变化后的延时基本都达到10us左右。另外,把SDA配置为输入或者输出模式最好直接用寄存器配置。接下来是stm32与BQ4050的通讯函数:
#define BQ4050_REG_TEMP 0x08 //Temperature U2
#define BQ4050_REG_VOLT 0x09 //Voltage U2#define BQ4050_REG_CURRENT 0x0A //CURRENT I2
#define BQ4050_REG_RSOC 0x0D //RelativeStateOfCharge U1
#define BQ4050_REG_FCC 0x10 //FullChargeCapacity U2
#define BQ4050_REG_TTE 0x12 //TimeToEmpty U2
#define BQ4050_REG_TTF 0x13 //TimeToFull U2
#define BQ4050_REG_RMC 0x0F ///* Remaining Capacity */
#define BQ4050_REG_CURR 0x0A
#define BQ4050_REG_DSG 0x16
#define BQ4050_ADD 0x16
int16_t Get_Battery_Info(uint8_t slaveAddr, uint8_t Comcode) { int16_t Value; uint8_t data[2] = {0}; IIC_Start(); IIC_Send_Byte(slaveAddr);//发送地址 if(IIC_Wait_Ack() == 1) { // printf("SlaveAddr wait ack fail! "); return -1; } IIC_Send_Byte(Comcode); delay_us(90); if(IIC_Wait_Ack() == 1) { // printf("Comcode wait ack fail! "); return -1; } IIC_Start(); IIC_Send_Byte(slaveAddr|0x01);//发送地址 if(IIC_Wait_Ack() == 1) { // printf("slaveAddr+1 wait ack fail! "); return -1; } delay_us(50); data[0] = IIC_Read_Byte(); IIC_Ack(); delay_us(125); data[1] = IIC_Read_Byte(); IIC_NAck(); delay_us(58); IIC_Stop(); printf("data[0]:%x,data[1]:%x ",data[0],data[1]); Value = (data[0] |(data[1]<<8)); delay_us(100); return Value; }
过程是:起始信号代表通讯开始——>发送BQ4050的器件地址,默认是0x16——>等待应答——>发送命令——>等待应答——>发送器件地址+1(1表示读,0表示写)——>等待应答信号——>读取数据——>发送应答信号——>再次读取数据——>发送非应答信号。BQ4050发送的数据是16bit的,第一次发送数据的低8位,第二次发送数据的高8位。我们将这两个数据拼接起来就是一个16bit的数据,注意电流有可能是负数,正数代表充电,负数代表放电。
但是调试的过程中,发现接收到的数据有时并不是正确的,很明显地超出了正常的范围,比如获取电压数据时第一个数据是一个正常的数据,第二个数据是第8位数据是1(电压没有负数,所以这一位为1将会是很大的数据,对比TI的上位机采集到的数据,似乎除了这一位,其他位都是正确的),判断是BQ4050在发送第二次数据的时候没有将SDA拉低,那么为什么拉不低呢?我猜是延时时间太短,来不及拉低,之前stm32接收第一个数据和接受第二个数据之间的间隔只有25us,经过测试,至少得50us才能避免这种情况,安全起见,我延时了125us。
即使这样,接收到的数据有时也不正确,比如发来两个连续的0xff,很明显就是错误的,幸好这种概率很低,在没有其他更好的解决办法之前,应该制定一种过滤算法,把错误的数据过滤掉。
PS:上面的延时函数是我在网上找到的,在不使用额外定时器的情况下,利用SysTick(滴答定时器)产生的微妙级延时:
#define CPU_FREQUENCY_MHZ 48
/********************************
*函数名称:void Delay_us(uint32_t delay)
*函数功能:微秒级别的延时
*函数形参:uint32_t delay ———— 延时时间
*函数返回值:无
********************************/
void delay_us(uint32_t delay)
{
int temp,last,curr,val;
while(delay != 0)
{
temp = delay > 900 ? 900 : delay;
last = SysTick->VAL;
curr = last - temp * CPU_FREQUENCY_MHZ;
if(curr > 0)
{
do
{
val = SysTick->VAL;
}
while(( val < last )&&( val >= curr));
}
else
{
curr += CPU_FREQUENCY_MHZ * 1000;
do
{
val = SysTick->VAL;
}
while(( val <= last )||( val > curr));
}
delay -= temp;
}
}
CPU_FREQUENCY_MHZ这个宏定义是当前单片机的主频率,我这里是48MHz。解释一下这个函数的实现过程:
1、如果形参传进来delay的数值小于900,那么temp的值就等于delay,这样的话只需要循环一次就可以实现延时delay us。
2、SysTick->VAL是滴答定时器的当前值寄存器,它是一个递减的寄存器,每过1us就会减1。last = SysTick->VAL求出现在last的数值大小。
3、curr = last - temp * CPU_FREQUENCY_MHZ。CPU_FREQUENCY_MHZ(48)这个值实际上主频(48000000)除以1000000,48000000代表1秒钟48000000次,那么48就是1us 48次,那么temp*48得出来的当然就是temp微妙的次数了。那么当SysTick->VAL减小到curr =last - temp * CPU_FREQUENCY_MHZ,就代表延时时间到了。
为了方便理解,我画了一个图:
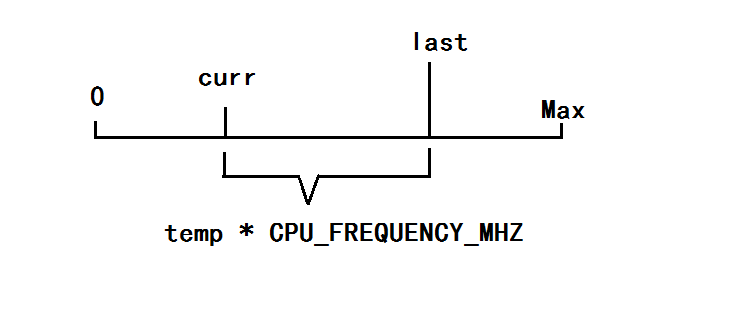
这是第一种情况,curr>0的情况,如果是curr得出来小于0呢?那就是第二种情况了,如图:
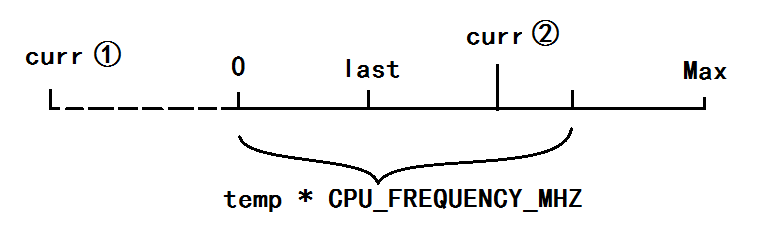
这样得出来的curr是一个负数,但是SysTick->VAL递减到0之后又从1000开始(这里Max是1000,即1000us,1ms),所以curr += CPU_FREQUENCY_MHZ * 1000得到curr②,即SysTick->VAL递减到0之后,从1000又开始递减到curr②这个位置,就是延时时间到了。
当然这是延时时间小于900的情况下,如果是延时时间大于900的,那就得重复多几次了,所以有了下面delay -= temp这个函数,如果delay大于900,就会再循环。
以上就是我对SMBus通讯的相关总结,如果有错误的地方,请大家斧正!