[ZJOI2018]保镖
Tags:题解
题意
链接
初始在平面上有一些点,九条可怜随机出现在一个矩形内的任意一点。若九条可怜出现在(O)点,则平面上所有的点都从(P_i)移动到(P'_i),使得(P'_i)在射线(OP_i)上,且满足(|OP_i|*|OP'_i|=1)。现在给定矩形范围,求这些点移动后所构成的凸包的期望点数。
(nle 2000,x,yle 10^5),精度要求绝对误差或相对误差不超过(10^{-7})。
题解
前言
神仙不可做题终于被杠下来了!撒花!
不得不说九老师这个多合一是出的真的牛逼!(比lalaxu不知道高明到哪里去了)
首先感谢Ez3real的代码框架(不过LOJ两人AC代码一样什么鬼)和yuhaoxiang的题解(这个网站很慢)。
Part 1 前置知识:圆与矩形的面积交
在计算几何基础里有。
Part 2 前置知识:三维凸包
在三维凸包里有。
Part 3 前置知识:欧拉公式
在Pick定理、欧拉公式和圆的反演里有。
Part 4 前置知识:反演
这道题显然是要求平面上的点关于(O)的、以(1)为反演幂(反演半径)的反形的凸包期望点数。
至于反演是什么可以看这个:Pick定理、欧拉公式和圆的反演
Part 5 前置知识:Voronoi图
又称泰森多边形。
大概就是一个平面划分,平面上的每个点划分到离它最近的关键点上。
Wiki有张十分形象的图
Part 6 前置知识:Delaunay三角剖分
三角剖分
感性理解一下就是

Delaunay三角剖分是一种有着优秀性质的三角剖分。
定理:对于任何一种三角剖分,三角形个数和外围凸包点数之和为2n-2。
这里凸包是严格凸的,也就是没有三点共线情况。
考虑用欧拉公式证明:设凸包上的点数为(k),三角形个数为(F-1),则有
#### **立体Delaunay三角剖分** 当然我们目前只考虑平面的Delaunay三角剖分,至于立体的可以看看这张图,本文不会涉及。  (图片来源于网络)
#### **Delaunay三角剖分和泰森多边形** Delaunay三角剖分和泰森多边形是对偶图。 对偶图是什么呢,看下面的构造方法: 泰森多边形的交点一般属于三个区域,将这三个区域的标志点连起来,就得到了一个原图的三角剖分。  (图片来源于网络) 上图中,实线是泰森多边形,虚线链接,得到标志点的一个Delaunay三角剖分。
#### **Delaunay三角剖分的性质** 由于其美妙的构造,可以得到一些美妙的性质:
- 平面上的点集有且仅有唯一的Delaunay三角剖分(除出现四点共圆的情况,这时泰森多边形有顶点属于四个区域)。
- 任意一个Delaunay三角形的外接圆不包含点集中的其他点。(称为Delaunay三角形的空圆性质)。
- Delaunay三角剖分相比其他的三角剖分,所有三角形的最小角最大
#### **Delaunay三角剖分的构造** 以下内容摘自百度百科 **Bowyer-Watson算法**
- 构造超级三角形(类似半平面交中的超级平面)。
- 插入点(P),找到点(P)的影响三角形(外接圆包括点(P)的三角形),删除影响三角形的公共边,并把(P)向这些影响到的点连边。
- 对原图进行优化
- 重复(2)直到所有点插入完毕
步骤2图示:
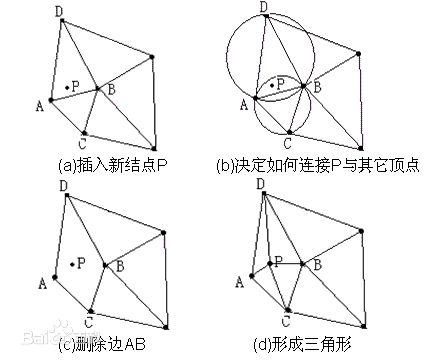
步骤3图示:转变连接对角线的方式使其满足空圆性质
和求三维凸包类似的复杂度分析,复杂度大概是(cal O(n^2))
Part 7 初步转化
凸包点数,只能整体地去求,由于三角剖分的定理,我们可以转而求三角剖分的三角形个数。
三角形个数是可以用期望算的。
每一个Delaunay三角形对应一个外接圆,我们称为Delaunay圆。所以题目又转化为算Delaunay圆的期望个数。若Delaunay圆的期望个数为(num),答案就是(Ans=2n-2-num)。
定义支配圆为包含点集中所有点的圆。Delaunay圆内不包含除Delaunay三角形三个顶点外的其他任何点,所以支配圆与Delaunay圆恰好相反。
则以下结论成立
- 对于Delaunay圆,若反演中心在圆内,其反形是支配圆;否则反形还是Delaunay圆。
- 对于支配圆,若反演中心在圆内,其反形是Delaunay圆;否则反形还是支配圆。
这题不用考虑反演中心在圆周上的情况(概率为0)
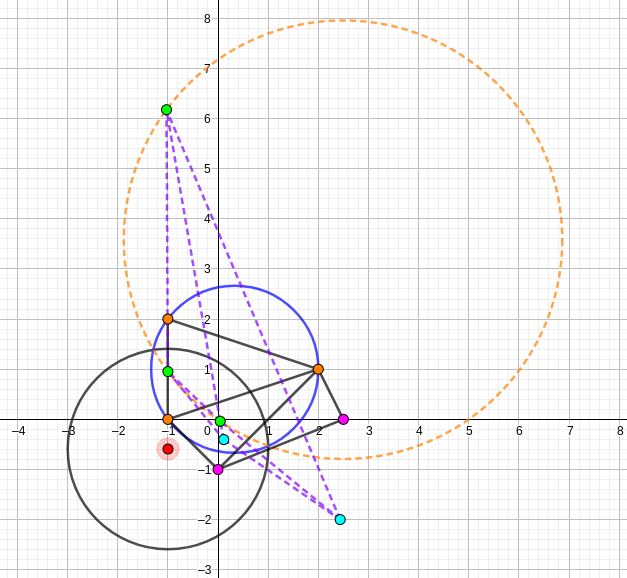
这里有yuhaoxiang大佬做的一个Geogebra演示文件,我把两种情况截图下来是这样的:
Delaunay圆,反演中心在圆内,反形是支配圆
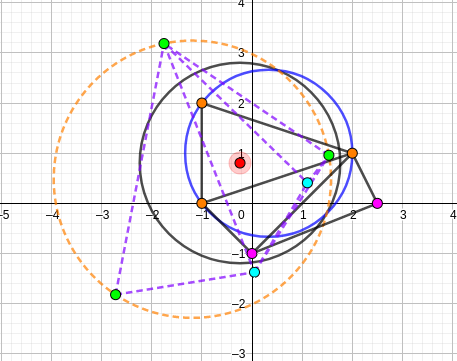
Delaunay圆,反演中心在远外,反形还是Delaunay圆
题目转化为:求原图中Delaunay圆的个数×反演中心在圆内的概率+支配圆的个数×反演中心在圆外的概率
若其期望为(E),则(Ans=2n-2-)反形是Delaunay圆的概率(=2+E)
(这句话看完(Part 8)再回来看)对于这(n)个点,每个点一定至少会是一个Delaunay圆对应的其中一个顶点,所以这(n)个点每个点都会出现在凸包上,则凸包一共有(2n-4)个面,所以Delaunay圆+支配圆(=2n-4)。
Part 8 进一步转化
考虑圆的方程$$x^2+y^2+Dx+Ey+F=0$$若令(z=x^2+y^2),可以得到(Dx+Ey+z+F=0),这是空间坐标系中的一个平面方程
(z=x^2+y^2)长这样:
例如圆((x-1)^2+(y-1)^2=1)可以表示为(-2x-2y+z+1=0),长这样:
自己做了一个动画:网址。
那么如果一个点((x,y))在圆上,则((x,y,x^2+y^2))在该圆对应的平面上
同理,在圆外或圆内,对应着在平面的一侧。具体来说,在其平面上面表示在圆外,在平面下面表示在圆内。
于是,把所有点映射到三维坐标系中,求凸包,下凸面对应Delaunay圆,上凸面对应支配圆。
Part 9 实现过程
首先读入所有的点并进行随机微小扰动,使得不存在多点共圆以及最后求出三维凸包中不存在与(z
)轴平行的凸面。
然后求解三维凸包,这里采用的是增量法。
对于每个凸面,得到对应的三个点、求出其外接圆。
- 如果其为上凸面,则其为支配圆,只有在反演中心在圆外,贡献答案
- 如果其为下凸面,则其为Delaunay圆,只有反演中心在圆内,贡献答案
那么就是算给定矩形和圆形的面积交,这个在前置知识(Part 1)里啦
Part 10 总结&代码
写了一年终于写完了!
完结撒花!!
这题考场上一定要果断丢,没有部分分。
这题出得很好,考察知识点全面。很巧妙的地方是:巧妙地把圆转化成三维空间的平面,从而把平面问题转化为三维凸包问题。巧妙地运用三角剖分,把求凸包顶点期望个数变为求圆的期望个数。
不得不说,orz jiry!!!
Code
#include<iostream>
#include<cmath>
#define db __float128
#define orzjiry_2 19491001
using namespace std;
const db eps=1e-10;
db Rand() {return 1.0*rand()/RAND_MAX;}
int sign(db x) {return x<-eps?-1:(x>eps);}
struct v2
{
db x,y;
v2 operator + (v2 a) {return (v2){x+a.x,y+a.y};}
v2 operator - (v2 a) {return (v2){x-a.x,y-a.y};}
v2 operator / (db t) {return (v2){x/t,y/t};}
v2 operator ^ (db t) {return (v2){x*t,y*t};}
db operator * (v2 a) {return x*a.y-y*a.x;}
db operator & (v2 a) {return x*a.x+y*a.y;}
db dis() {return sqrt((double)(x*x+y*y));}
db dis2() {return x*x+y*y;}
void rot() {db t=x;x=-y;y=t;}
}jir[4];
struct v3
{
db x,y,z;
v3 operator + (v3 a) {return (v3){x+a.x,y+a.y,z+a.z};}
v3 operator - (v3 a) {return (v3){x-a.x,y-a.y,z-a.z};}
v3 operator * (v3 a) {return (v3){y*a.z-z*a.y,z*a.x-x*a.z,x*a.y-y*a.x};}
db operator & (v3 a) {return x*a.x+y*a.y+z*a.z;}
void shake() {x+=Rand()*1e-10,y+=Rand()*1e-10,z+=Rand()*1e-10;}
}P[2100];
struct Face
{
int v[3];
v3 Normal() {return (P[v[1]]-P[v[0]])*(P[v[2]]-P[v[0]]);}
}F[8100],C[8100];
int n,cnt;
namespace TAT2D
{
v2 Cross(v2 a1,v2 a2,v2 b1,v2 b2)
{
v2 a=a2-a1,b=b2-b1,c=b1-a1;
db t=(b*c)/(b*a);
return a1+(a^t);
}
int cmp(db a,db b) {return sign(a-b);}
db rad(v2 p1,v2 p2) {return atan2(double(p1*p2),double(p1&p2));}
db Calc(db r,v2 p1,v2 p2)
{
v2 e=(p1-p2)/(p1-p2).dis(),e1=e;e.rot();
v2 mid=Cross(p1,p2,(v2){0,0},e),d1=mid;
if(d1.dis()>r) return r*r*rad(p1,p2)/2;
db d=sqrt(double(r*r-d1.dis2()));
v2 w1=mid+(e1^d),w2=mid-(e1^d);
int b1=cmp(p1.dis2(),r*r)==1,b2=cmp(p2.dis2(),r*r)==1;
if(b1&&b2)
{
if(sign((p1-w1)&(p2-w1))<=0)
return r*r*(rad(p1,w1)+rad(w2,p2))/2+(w1*w2)/2;
else return r*r*rad(p1,p2)/2;
}
if(b1) return (r*r*rad(p1,w1)+w1*p2)/2;
if(b2) return (p1*w2+r*r*rad(w2,p2))/2;
return p1*p2/2;
}
db intersect(v2 O,db r)
{
db res=0;
for(int i=0;i<4;i++)
res+=Calc(r,jir[i]-O,jir[(i+1)%4]-O);
return res;
}
}
namespace TAT3D
{
bool vis[2100][2100];
int see(Face a,v3 b) {return ((b-P[a.v[0]])&a.Normal())>0;}
void Convex()
{
for(int i=0;i<n;i++) P[i].shake();
int cc=-1;cnt=-1;
F[++cnt]=(Face){0,1,2};
F[++cnt]=(Face){2,1,0};
for(int i=3;i<n;i++)
{
for(int j=0,v;j<=cnt;j++)
{
if(!(v=see(F[j],P[i]))) C[++cc]=F[j];
for(int k=0;k<3;k++) vis[F[j].v[k]][F[j].v[(k+1)%3]]=v;
}
for(int j=0;j<=cnt;j++)
for(int k=0;k<3;k++)
{
int x=F[j].v[k],y=F[j].v[(k+1)%3];
if(vis[x][y]&&!vis[y][x]) C[++cc]=(Face){x,y,i};
}
for(int j=0;j<=cc;j++) F[j]=C[j];
cnt=cc;cc=-1;
}
}
}
int main()
{
//Part 1 输入以及初步转化
srand(orzjiry_2);
double xx,yy;
cin>>n>>xx>>yy;jir[0]=(v2){xx,yy};
cin>> xx>>yy;jir[2]=(v2){xx,yy};
jir[1]=(v2){jir[2].x,jir[0].y};
jir[3]=(v2){jir[0].x,jir[2].y};
db S=(jir[2].x-jir[0].x)*(jir[2].y-jir[0].y),Ans=0;
for(int i=0;i<n;i++)
{
double x,y;cin>>x>>y;
P[i]=(v3){x,y,x*x+y*y};
}
//Part 2 计算三维凸包并求出反演后支配圆的期望数量
TAT3D::Convex();
for(int i=0;i<=cnt;i++)
{
v3 o=F[i].Normal();
v2 a1=(v2){P[F[i].v[0]].x,P[F[i].v[0]].y};
v2 a2=(v2){P[F[i].v[1]].x,P[F[i].v[1]].y};
v2 c=(a1+a2)/2.0,d=a2-a1;d.rot();
a1=c;a2=c+d;
v2 b1=(v2){P[F[i].v[1]].x,P[F[i].v[1]].y};
v2 b2=(v2){P[F[i].v[2]].x,P[F[i].v[2]].y};
c=(b1+b2)/2.0,d=b2-b1;d.rot();
b1=c;b2=c+d;
v2 O=TAT2D::Cross(a1,a2,b1,b2);
d=(v2){P[F[i].v[0]].x,P[F[i].v[0]].y};
db r=(O-d).dis();
if(o.z>0) Ans+=S-TAT2D::intersect(O,r);
else Ans+=TAT2D::intersect(O,r);
}
printf("%.11f
",(double)(Ans/S+2));
}