LCA
解法一:Tarjan 【O(n+q)】
流程
初始化fa[i]=i,vis[i]=0.
从树根开始DFS,标记当前搜索中的节点(v)vis[v] = -1。然后搜索其满足(vis[i]=0)的所有子节点(i)。当一个节点(v)的所有子节点均被搜索过(或无子节点)时,则用并查集的合并操作,令(fa[v])为其祖先节点。然后开始查找与节点(v)有询问关系的节点(q),若(q)已被搜索过(vis[q] = 1),则(LCA(v,q)=find(q))。遍历完有询问关系的节点后,标记(v)已被搜索完毕vis[v] = 1。
离线操作,将(q)个询问以链式前向星双向边的形式存储,也就是说共(2q)条边。当(i)为奇数时,(i)与(i+1)是同样两个节点,答案应该一致,所以在记录答案时代码如下:
for (int i = headq[u]; i; i = eq[i].next) {
int v = eq[i].to;
if (vis[v] == 1) {
lca[i] = find(v);
if (i % 2) lca[i + 1] = lca[i];
else lca[i - 1] = lca[i];
}
}
完整代码
const int INF = 0x3f3f3f;
const int maxn = 2e6 + 100;
struct Edge {
int from, to, next; LL w;
}e[maxn * 4], eq[maxn * 4];
int cnt_e = 0, head[maxn], headq[maxn], n, m;
int vis[maxn], fa[maxn];
int lca[maxn];
void add(int head[], Edge e[], int u, int v) {
e[++cnt_e].next = head[u]; e[cnt_e].from = u; e[cnt_e].to = v; head[u] = cnt_e;
}
int find(int x) {
return x == fa[x] ? x : fa[x] = find(fa[x]);
}
void merge(int x, int y) {
int a = find(x);
int b = find(y);
if (a != b) {
fa[a] = b;
}
}
void tarjan(int u) {
vis[u] = -1;
//标记u正在搜索,防止来回dfs死循环
for (int i = head[u]; i; i = e[i].next) {
int v = e[i].to;
if (!vis[v]) {
//只有未搜索过的子节点才能继续搜索
tarjan(v);
merge(v, u);
}
}
//查找与u有询问关系的节点
for (int i = headq[u]; i; i = eq[i].next) {
int v = eq[i].to;
if (vis[v] == 1) {
//v已经搜索过,则u和v的最近公共祖先就是v的祖先
lca[i] = find(v);
//存询问的时候存了双向边,两条边答案应该一致
if (i % 2) lca[i + 1] = lca[i];
else lca[i - 1] = lca[i];
}
}
vis[u] = 1;
//标记节点u(及其所有子节点)已经搜索完毕
}
int main() {
int q, s;
cin >> n >> q >> s;
for (int i = 1; i <= n; i++) fa[i] = i;
for (int i = 1; i <= n - 1; i++) {
int u, v;
cin >> u >> v;
add(head, e, u, v);
add(head, e, v, u);
}
cnt_e = 0;
//建新图之前记得初始化这个
for (int i = 1; i <= q; i++) {
int u, v;
cin >> u >> v;
add(headq, eq, u, v);
add(headq, eq, v, u);
}
tarjan(s);
for (int i = 1; i <= q; i++) {
cout << lca[i*2] << endl;
}
return 0;
}
解法二:倍增 【O((n+q)logn)】
导入
容易想到这样一种求LCA的暴力解法:对于节点(u),(v),一直向上查找它们的父节点/祖先节点(root_u)和(root_v),直到(root_u=root_v),此时就得到了它们的LCA。
显然这样的做法非常耗时,能不能把步子迈大一点呢?
我们有这么一个结论:任意正整数(k),都可以表示为(2^i)之和(如(9=2^3+2^0))。
也就是说,无论我们要向上跳多少层,都可以用这样的方法在(log_2n)步后跳到。
如果将逐步向上查找改为(2^i)次方地往上跳(比如一口气先向上跳8层,再接着向上跳4层,2层……逐渐接近最近公共祖先),时间将优化为(O((n+q)logn))
流程
令(lg[i])的值为(log_2i+1)(其中(log_2i)向下取整),预处理算出。(其实是一种常数优化)
lg[0] = 0;
for (int i = 1; i <= n; i++) {
lg[i] = lg[i - 1] + (1 << lg[i - 1] == i);
}
用(depth[i])记录节点(i)的深度,(fa[i][j])记录节点(i)的第(2^j)级祖先,同样预处理算出。
(注:节点(i)的第(1)级祖先即它的父节点,第(2)级祖先即它的爷爷节点,以此类推)
void dfs(int u, int pre) {
//u为当前节点,pre为u的父节点
fa[u][0] = pre;
depth[u] = depth[pre] + 1;
for (int i = 1; i <= lg[depth[u]]; i++) {
//这里体现了lg数组的用处:用u的深度来推出要倍增跳几次才能跳到树根
fa[u][i] = fa[fa[u][i - 1]][i - 1];
//这一行是倍增的核心
//意思是节点u的2^i级祖先就是它2^(i-1)级祖先的2^(i-1)级祖先
//比如,节点u的爷爷节点(2级祖先)就是它父节点(1级祖先)的父节点(1级祖先)
}
for (int i = head[u]; i; i = e[i].next) {
if (e[i].to != pre) dfs(e[i].to, u);
//加一个判断,确保向着子节点dfs
}
}
设询问LCA的两个节点分别为(u)和(v),先将其中更深的节点拉到和另一个节点同一深度。如果刚好拉到了另一个节点上,这个深度浅的节点就是LCA。否则,尝试从最大的步子开始迈,如果会一下迈到公共祖先,说明步子太大,幂次需要减小;如果不会迈到公共祖先,就让两个节点都跳上去,继续逼近LCA。
int LCA(int u, int v) {
if (depth[u] < depth[v]) swap(u, v);
//不妨设u的深度>v的深度
while (depth[u] > depth[v]) {
u = fa[u][lg[depth[u] - depth[v]] - 1];
//将更深的节点u拉到和v同一深度
}
if (u == v) return v;
for (int k = lg[depth[u]] - 1; k >= 0; k--) {
//倍增的核心之二
if (fa[u][k] != fa[v][k]) {
//先尝试迈最大的步子,一步跳2^(lg[depth[u]]-1)这么多层
//如果相同,说明会跳到公共祖先,也就是步子太大,幂次要小一点
//如果不相同,说明可以继续往上跳,更加逼近LCA
//目标是跳到LCA所在深度的下面一层
u = fa[u][k];
v = fa[v][k];
}
}
return fa[u][0];
//u和v跳到了LCA的下面一层,父节点就是LCA
}
完整代码
const int INF = 0x3f3f3f;
const int maxn = 2e6 + 100;
struct Edge {
int from, to, next; LL w;
}e[maxn * 4], eq[maxn * 4];
int cnt_e = 0, head[maxn], n, m;
int fa[maxn][22];//2的22次方是四百多万,小于n
int depth[maxn], lg[maxn];
void add(int head[], Edge e[], int u, int v) {
e[++cnt_e].next = head[u]; e[cnt_e].from = u; e[cnt_e].to = v; head[u] = cnt_e;
}
void addw(int head[], Edge e[], int u, int v, LL w) {
e[++cnt_e].next = head[u]; e[cnt_e].from = u; e[cnt_e].to = v; e[cnt_e].w = w; head[u] = cnt_e;
}
void dfs(int u, int pre) {
//u为当前节点,pre为u的父节点
fa[u][0] = pre;
depth[u] = depth[pre] + 1;
for (int i = 1; i <= lg[depth[u]]; i++) {
//lg数组的用处:用u的深度来推出要两级两级地跳几次才能跳到树根
fa[u][i] = fa[fa[u][i - 1]][i - 1];
//这一行是倍增的核心
//意思是节点u的2^i级祖先就是它2^(i-1)级祖先的2^(i-1)级祖先
//比如,节点u的爷爷节点(2级祖先)就是它父节点(1级祖先)的父节点(1级祖先)
}
for (int i = head[u]; i; i = e[i].next) {
if (e[i].to != pre) dfs(e[i].to, u);
//加一个判断,确保向着子节点dfs
}
}
int LCA(int u, int v) {
if (depth[u] < depth[v]) swap(u, v);
//不妨设u的深度>v的深度
while (depth[u] > depth[v]) {
u = fa[u][lg[depth[u] - depth[v]] - 1];
//将更深的节点u拉到和v同一深度
}
if (u == v) return v;
for (int k = lg[depth[u]] - 1; k >= 0; k--) {
if (fa[u][k] != fa[v][k]) {
//跳到LCA的下面一层即可
u = fa[u][k];
v = fa[v][k];
}
}
return fa[u][0];
//u和v跳到了LCA的下面一层,父节点就是LCA
}
int main() {
int q, s;
cin >> n >> q >> s;
for (int i = 1; i <= n; i++) {
lg[i] = lg[i - 1] + (1 << lg[i - 1] == i);
}
for (int i = 1; i <= n - 1; i++) {
int u, v;
cin >> u >> v;
add(head, e, u, v);
add(head, e, v, u);
}
//预先算出log_2(i)+1的值,其中log_2(i)向下取整
dfs(s, 0);
//预处理出depth[i]和fa[i][j]
for (int i = 1; i <= q; i++) {
int u, v;
cin >> u >> v;
cout << LCA(u, v) << endl;
}
return 0;
}
解法三:RMQ【O(nlogn)+O(1)】
RMQ算法预处理(O(nlogn)), 查询(O(1)),适合询问量很大的情形。
预备知识
DFS序:对一棵树进行DFS时,对每个结点开始访问时的顺序。
欧拉序:对一棵树进行DFS时,对每个结点开始访问和结束访问(注意这里的结束访问是当结束了它的一棵子树所有访问时)的顺序。
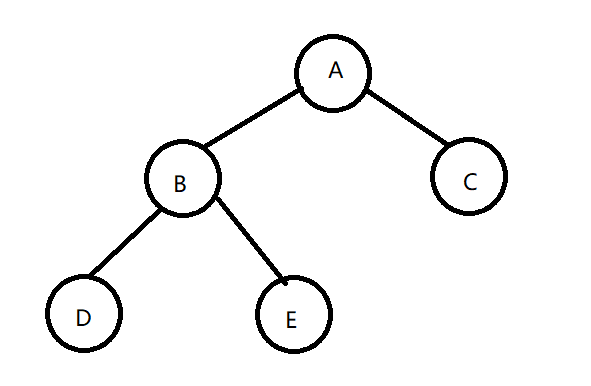
对于上图的树,
DFS序为:A→B→D→E→C;
欧拉序为:A→B→D→B→E→B→A→C→A
括号定理:对一棵树进行DFS,记录每一个节点出入栈的时间,则可以将树转化为线性结构。记节点(u)的入栈时间为(in[u]),出栈时间为(out[u]),则在时间区间([in[u],out[u]])内出入栈的节点必属于(u)的子树。
ST表:https://www.cnblogs.com/streamazure/p/13889947.html
导入
容易想到,两个节点的最近公共祖先就是囊括了这两个节点的最小子树的根。
如何得到这个根?再观察一下欧拉序,只要在(u)开始访问到(v)开始访问这段区间内找到深度最浅的节点即可。
维护区间的数据结构有很多,比如线段树。但对于这个问题,我们用更快的ST表解决。
ST表的应用关键在于重叠区间不会影响问题的结果,所以它可以求得区间最值问题,但不能求区间和。对于LCA问题,我们要找的是区间内深度值最浅的点,这也是个区间最值问题,故可以应用ST表。
注意事项
- 因为一个点会多次进出,存储欧拉序的数组要开得很大才够用
- ST表预处理的时候记得把边界改为tot(欧拉序数组的长度),别直接套模板照搬n,这里的n是节点数。
- 查询的时候用节点首次出现的时间作为左右端点
完整代码
const int maxn = 4e6 + 100;
struct Edge {
int from, to, next; LL w;
}e[maxn * 4];
int cnt_e = 0, head[maxn], n, m;
int fa[maxn][22];//2的22次方是四百多万,小于n
int depth[maxn],st[maxn][22], lg[maxn];
int dfn[maxn], fir[maxn];
//因为一个点会多次进出,欧拉序数组需要开得很大
//fir记录一个点首次出现的时间
int tot = 0;
void add(int head[], Edge e[], int u, int v) {
e[++cnt_e].next = head[u]; e[cnt_e].from = u; e[cnt_e].to = v; head[u] = cnt_e;
}
void ST() {
//ST表预处理部分
lg[0] = -1;
for (int i = 1; i <= tot; i++) {
lg[i] = lg[i / 2] + 1;
}
for (int j = 1; j <= lg[tot]; j++) {
//枚举区间长度
//注意边界!!st数组的长度是tot不是n!!
for (int i = 1; i + (1 << j) - 1 <= tot; i++) {
//注意边界!!st数组的长度是tot不是n!!
//注意f数组中储存的是一段时间区间内最小深度值所对应的节点,没有直接储存深度值
int x = st[i][j - 1];
int y = st[i + (1 << (j - 1))][j - 1];
if (depth[x] < depth[y]) st[i][j] = x;
else st[i][j] = y;
}
}
}
void dfs(int u,int pre) {
//预处理出欧拉序和深度
dfn[++tot] = u;
if (!fir[u]) fir[u] = tot;
depth[u] = depth[pre] + 1;
st[tot][0] = u;
//ST表预处理部分,记录一个时刻对应的节点
//记录开始访问的时间
for (int i = head[u]; i; i = e[i].next) {
int v = e[i].to;
if (v != pre) {
dfs(v, u);
dfn[++tot] = u;
st[tot][0] = u;
//ST表预处理部分,记录结束访问时刻对应的节点
//这一行记得写在大括号里!!只有在真的访问到子节点的时候才执行
}
}
}
int LCA(int l, int r) {
//ST表查询部分
int k = lg[r - l + 1];
int x = st[l][k];
int y = st[r - (1 << k) + 1][k];
if (depth[x] < depth[y]) return x;
else return y;
}
int main() {
int s;
cin >> n >> m >> s;
for (int i = 1; i <= n - 1; i++) {
int u, v;
cin >> u >> v;
add(head, e, u, v);
add(head, e, v, u);
}
dfs(s, 0);
ST();
for (int i = 1; i <= m; i++) {
int l, r;
cin >> l >> r;
if (fir[l] > fir[r]) swap(l, r);
cout << LCA(fir[l], fir[r]) << endl;
//序列的下标就是时间,要找出节点对应的开始访问时间作为区间端点
}
return 0;
}