本篇文章发表在ICLR2020上,对动态图的进行连接预测和结点分类。TGN中,作者除利用传统的图神经网络捕捉非欧式结构生成embedding外,还利用动态图所中时序信息。
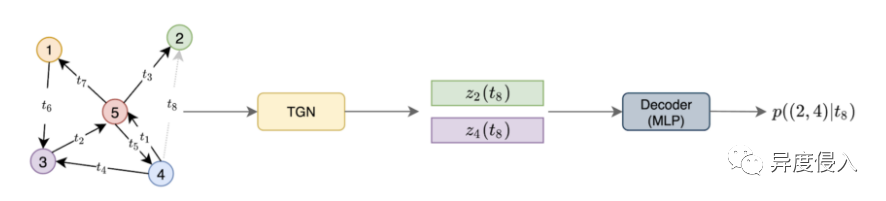
TGN主要是由编码器和解码器构成,其中编码器负责将动态网络的每个结点编码成一个向量,解码器会根据具体的训练问题对编码后的向量计算预测属性值,最后根据decoder得到的值设计损失函数,通过优化损失函数来对整个网络进行优化。
先说一下TGN方法的细节:
上面两页是概述,下面是细节:
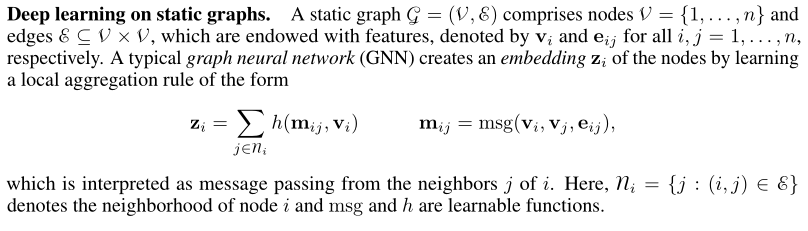
按照论文的顺序,先介绍一下背景,在静态图中的深度学习常通过邻居节点的信息传递函数来做到
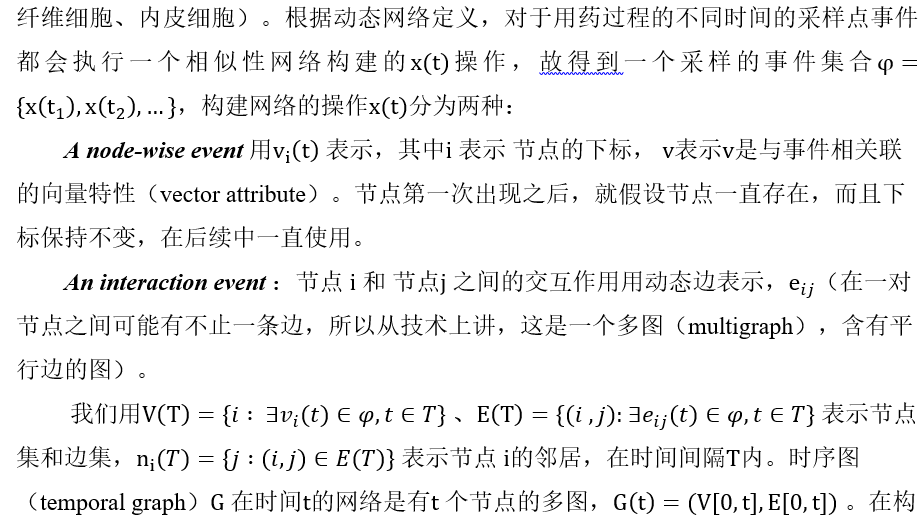 懒得重新敲公式了,直接摘了一段自己写在word里的总结。。。。忽略建图的背景
懒得重新敲公式了,直接摘了一段自己写在word里的总结。。。。忽略建图的背景
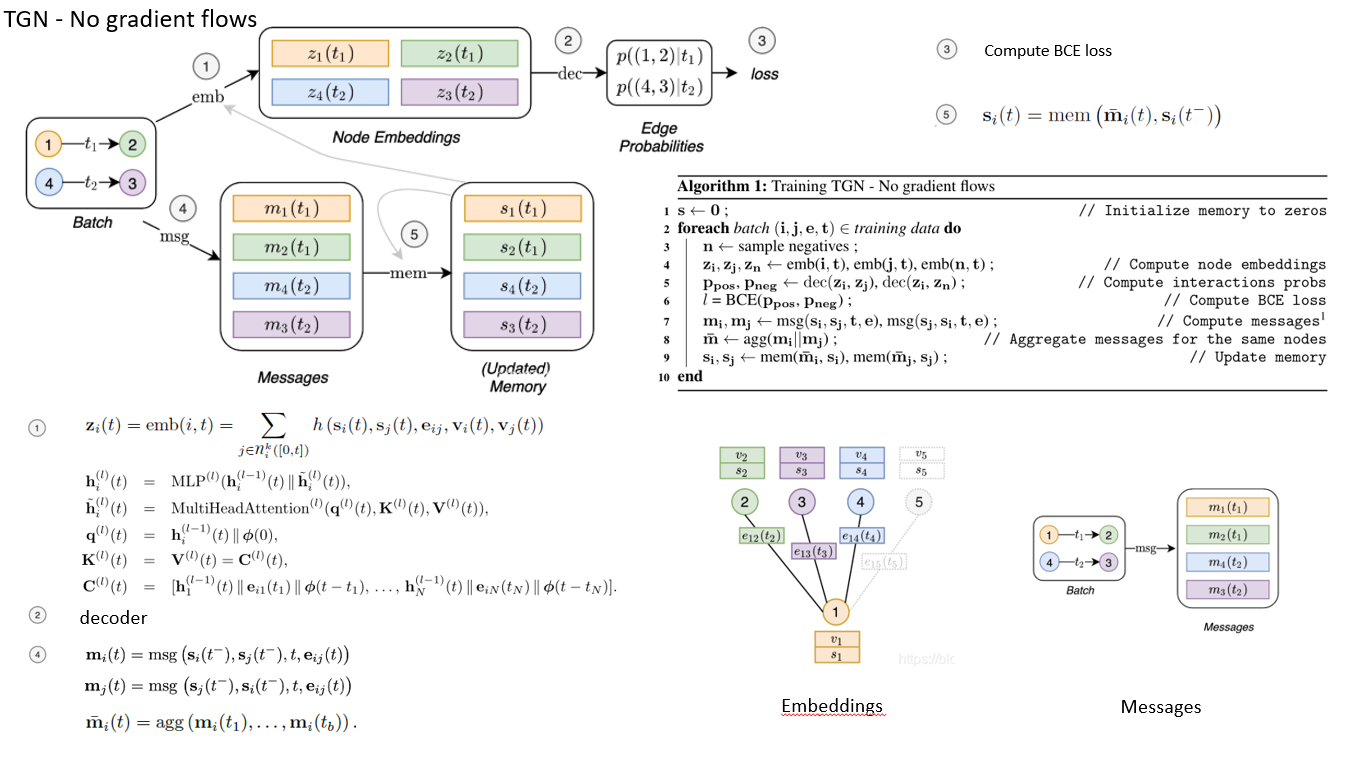
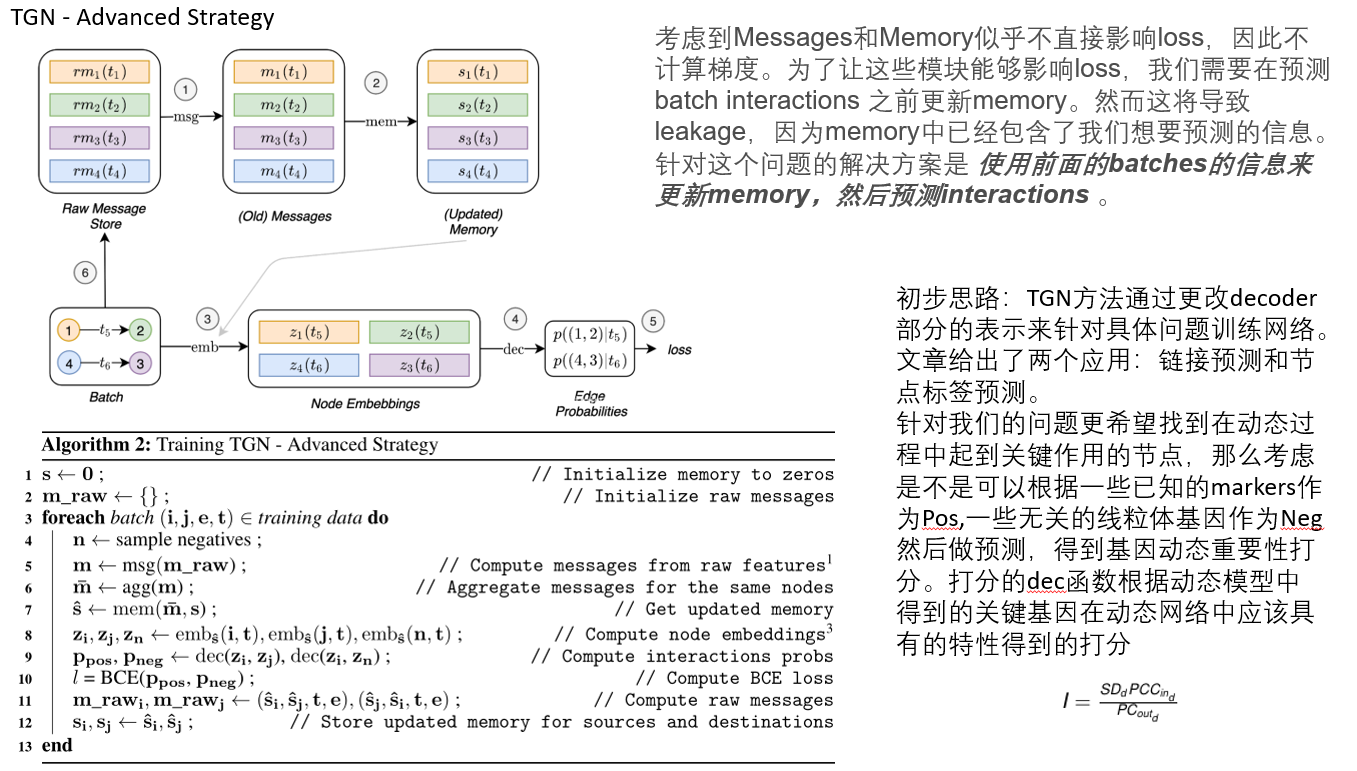
有了以上两个背景,提出了本文的动态神经网络的整体流程图
我们分块来讲,
Messages:
Messages Function: 对于涉及节点i的每个事件,都会计算一条消息以更新i的内存。对于在时间t的节点i和j之间的交互事件eij(t),可以为分别开始和接收交互的源节点和目标节点计算两条消息:

同样,在节点事件vi(t)的情况下,可以为该事件所涉及的节点计算一条消息:
在这里,si(t-)是节点i在时间t之前的内存,而msgs,msgd和msgnare是可学习的消息函数,例如MLP。在我们所有的实验中,为简单起见,我们选择消息函数作为标识(id),它只是输入的串联.
Messages Aggregator
由于效率原因而诉诸批处理(batch),但可能会导致涉及同一批中同一节点i的多个事件。当每个事件在我们的公式中生成一条消息时,我们使用一种机制来聚合消息

在这里,agg是一个聚合函数。尽管可以考虑多种选择来实现此模块(例如,RNN或对节点内存的关注),但为简单起见,我们在实验中考虑了两种有效的不可学习的解决方案:最新消息(对于给定的消息仅保留最新消息)节点)和平均消息(平均给定节点的所有消息)。我们将可学习的聚合作为未来的研究方向。
Memory : 模型的内存(状态)由模型迄今所见的每个节点的向量si(t)组成。当节点涉及事件时(例如与另一个节点的交互或逐节点变化),节点的存储器被更新,并且其目的是以压缩格式表示节点的历史。多亏了这个特定的模块,TGN才能够记住图中每个节点的长期依赖关系。另外,可以将全局存储器添加到模型中以跟踪整个时间网络的演变。虽然我们设想了这种内存可能带来的好处(例如,信息可以轻松地在图形中传播很长一段距离,但是可以通过全局状态的变化来更新节点的内存,可以轻松地基于全局内存进行基于图形的预测),这样的方向没有在这项工作中进行探索,因此留待将来的研究。
Memory Updater :节点的内存在涉及节点本身的每个事件时都会更新: 对于涉及两个节点i和j的交互事件,事件发生后将更新两个节点的内存。对于节点事件,仅更新相关节点的内存。在此,mem是可学习的内存更新功能,例如递归神经网络,例如LSTM [29]或GRU
对于涉及两个节点i和j的交互事件,事件发生后将更新两个节点的内存。对于节点事件,仅更新相关节点的内存。在此,mem是可学习的内存更新功能,例如递归神经网络,例如LSTM [29]或GRU
Embedding :
嵌入模块用于在任何时间t生成节点i的时间嵌入zi(t)。嵌入模块的主要目的是避免所谓的staleness问题。由于节点i的内存仅在节点参与事件时才更新,因此可能会发生以下情况:长时间不存在事件(例如,社交网络用户在活跃之前停止使用平台一段时间)再次),我的记忆变得陈旧。尽管可以实现嵌入模块的多种实现,但我们使用以下形式:

其中h是一个可学习的函数。在特定情况下,这包括许多不同的公式:
Identity(id): ,它直接使用内存作为节点嵌入。
,它直接使用内存作为节点嵌入。
Time projection (time): ,其中w是可学习的参数,∆t是自上一次交互以来的时间,而◦表示逐元素矢量积。此版本的嵌入方法已在JODIE中使用。
,其中w是可学习的参数,∆t是自上一次交互以来的时间,而◦表示逐元素矢量积。此版本的嵌入方法已在JODIE中使用。
Temporal Graph Attention (attn):一系列L图注意层通过汇总来自其L跳时间邻域的信息来计算i的嵌入。第l层的输入是i表示 ,当前时间戳t,i邻域表示
,当前时间戳t,i邻域表示 以及时间戳
以及时间戳 下对于在i的时间邻域中形成边的每个考虑的相互作用,
下对于在i的时间邻域中形成边的每个考虑的相互作用,

在此,φ(·)表示通用时间编码,k是级联运算符,zi(t)= emb(i,t)= h(L)i(t)。每层相当于执行多头注意[60],其中查询(q(l)(t))是参考节点(即目标节点或其L-1跳近邻之一),而密钥K (l)(t)和值V(l)(t)是其邻居。最后,使用MLP将参考节点表示形式与聚合信息组合在一起。与该层的原始公式(首先在TGAT中提出)不同,在此情况下,不使用节点级时态特征,在本例中,每个节点的输入表示为h(0)j(t)= sj(t)+ vj(t),因此它允许模型利用当前内存sj(t)和时间节点特征vj(t)。
Temporal Graph Sum (sum): 图上更简单,更快速的聚合:

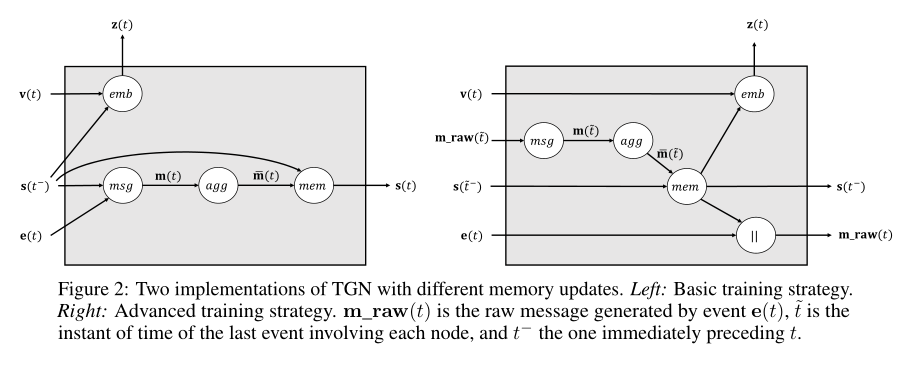
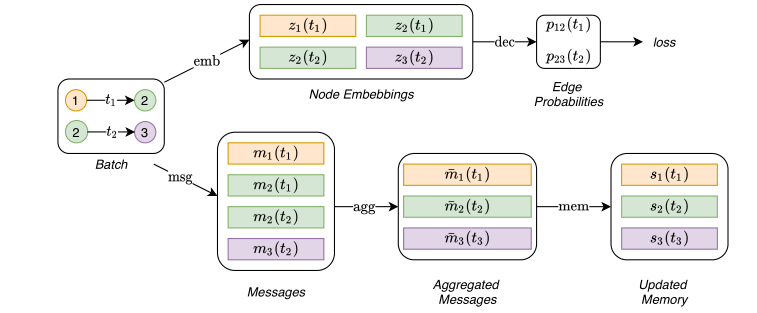
两种训练机制: