1、图像阈值与二值化
阈值是一种简单的图像分割方法,一幅图像包括目标物体(前景)、背景还有噪声,要想从数字图像中直接提取出目标物体,可以设定一个像素值即阈值,然后用图像的每一个像素点和阈值做比较,给出判定结果。
二值化是特殊的阈值分割方法,把图像分为两部分,以阈值T为分割线,大于T的像素群和小于T的像素群,这样图像就变为黑白二色图像。通过设定一个标准如果大于这个标准就设为白,如果小于这个标准就设为黑,而这个标准就是阈值。
2、OpenCV阈值threshold
double threshold(InputArray src, OutputArray dst, double thresh, double maxval, int type);
(1)第一个参数,InputArray 类型的 src,源图像。单通道,8 或 32位浮点数类型的深度。
(2)第二个参数,OutputArray 类型的 dst,输出图像。
(3)第三个参数,double 类型的 thresh,选取的阈值。
(4)第四个参数,double 类型的 maxval。
(5)第五个参数,int 类型的 type。阈值类型。如下所示:
type类型如下:
enum cv::ThresholdTypes { cv::THRESH_BINARY = 0, cv::THRESH_BINARY_INV = 1, cv::THRESH_TRUNC = 2, cv::THRESH_TOZERO = 3, cv::THRESH_TOZERO_INV = 4, cv::THRESH_MASK = 7, cv::THRESH_OTSU = 8, cv::THRESH_TRIANGLE = 16 }
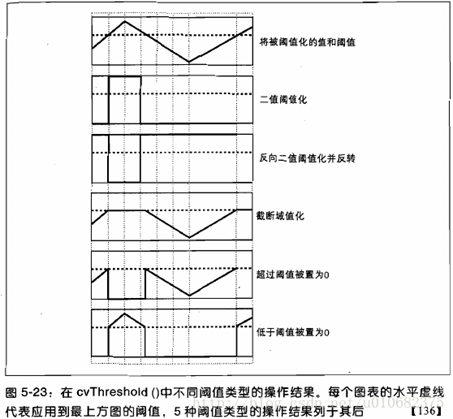
不同的阈值方法生成关系如下图。
Mat img = Mat::zeros(6, 6, CV_8UC1); randu(img, 0, 255); int th = 100; Mat threshold1, threshold2, threshold3, threshold4, threshold5, threshold6, threshold7, threshold8; threshold(img, threshold1, th, 200, THRESH_BINARY); threshold(img, threshold2, th, 200, THRESH_BINARY_INV); threshold(img, threshold3, th, 200, THRESH_TRUNC); cout << "raw= "<<img << " " << endl; cout << "THRESH_BINARY= " << threshold1 << " " << endl; cout << "THRESH_BINARY_INV= " << threshold2 << " " << endl; cout << "THRESH_TRUNC= " << threshold3 << " " << endl;
上面代码中randu(img, 0, 255)作用是产出随机数填充img矩阵。输出结果如下。
raw= [ 91, 2, 79, 179, 52, 205; 236, 8, 181, 239, 26, 248; 207, 218, 45, 183, 158, 101; 102, 18, 118, 68, 210, 139; 198, 207, 211, 181, 162, 197; 191, 196, 40, 7, 243, 230] THRESH_BINARY= [ 0, 0, 0, 200, 0, 200; 200, 0, 200, 200, 0, 200; 200, 200, 0, 200, 200, 200; 200, 0, 200, 0, 200, 200; 200, 200, 200, 200, 200, 200; 200, 200, 0, 0, 200, 200] THRESH_BINARY_INV= [200, 200, 200, 0, 200, 0; 0, 200, 0, 0, 200, 0; 0, 0, 200, 0, 0, 0; 0, 200, 0, 200, 0, 0; 0, 0, 0, 0, 0, 0; 0, 0, 200, 200, 0, 0] THRESH_TRUNC= [ 91, 2, 79, 100, 52, 100; 100, 8, 100, 100, 26, 100; 100, 100, 45, 100, 100, 100; 100, 18, 100, 68, 100, 100; 100, 100, 100, 100, 100, 100; 100, 100, 40, 7, 100, 100]
THRESH_BINARY,thresh=100,maxval=200,大于阈值限定为200,小于阈值清零。
THRESH_BINARY_INV的作用和THRESH_BINARY 相反,小于阈值置200,大于阈值清。
THRESH_TRUNC的作用是对大于阈值的数据进行截断,其余值保留原值不变。
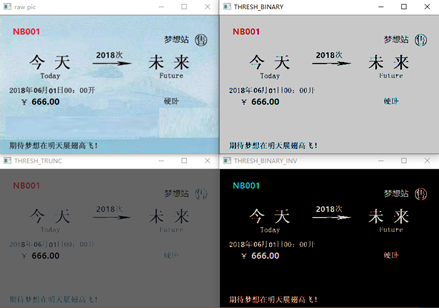
图像阈值例子如下。
Mat img = imread("D:/WORK/5.OpenCV/LeanOpenCV/pic_src/pic6.bmp", IMREAD_GRAYSCALE); int th = 100; Mat threshold1, threshold2, threshold3, threshold4, threshold5, threshold6, threshold7, threshold8; threshold(img, threshold1, th, 200, THRESH_BINARY); threshold(img, threshold2, th, 200, THRESH_BINARY_INV); threshold(img, threshold3, th, 200, THRESH_TRUNC); imshow("raw pic",img); imshow("THRESH_BINARY", threshold1); imshow("THRESH_BINARY_INV", threshold2); imshow("THRESH_TRUNC", threshold3);
3、自动阈值—大津法OTSU
最大类间方差是由日本学者大津(Nobuyuki Otsu)于1979年提出,是一种自适应的阈值确定方法。算法假设图像像素能够根据阈值,被分成背景[background]和目标[objects]两部分。然后,计算该最佳阈值来区分这两类像素,使得两类像素区分度最大。
算法原理为:
设图像Img长宽尺寸为M*N, T为二值化的阈值;
N0为灰度小于T的像素的个数,N0的平均灰度为μ0。
N1 为灰度大于T的像素的个数,N1的平均灰度为μ1。
ω0=N0/ M×N (1) //落在N0的概率
ω1=N1/ M×N (2) //落在N1的概率
N0+N1=M×N (3)
ω0+ω1=1 (4)
μ=ω0*μ0+ω1*μ1 (5) //平均灰度乘以概率 再相加
g=ω0(μ0-μ)^2+ω1(μ1-μ)^2 (6) //类间方差
将式(5)代入式(6),得到等价公式: g=ω0ω1(μ0-μ1)^2 (7)
OpenCV自带了OSTU算法。
Mat img = imread("D:/WORK/5.OpenCV/LeanOpenCV/pic_src/pic2.bmp", IMREAD_GRAYSCALE); int th = 100; Mat threshold1, threshold2, threshold3; threshold(img, threshold1, th, 255, THRESH_BINARY); threshold(img, threshold2, th, 255, THRESH_TRUNC); threshold(img, threshold3, th, 255, THRESH_OTSU); // 阈值随意设置即可 imshow("raw pic",img); imshow("THRESH_BINARY", threshold1); imshow("THRESH_TRUNC", threshold2); imshow("THRESH_OTSU", threshold3);
使用大津法时阈值可以不设置或随意设置,函数会自动计算最合适的阈值,输出图像如下。

大津法相比其他二值化方法,能很好的筛选出前景图和背景图,让图像分类后黑白区分度最大。
4、参考文献
1、《学习OpenCV》,清华大学出版社,Gary Bradski, Adrian kaehler著
2、Miscellaneous Image Transformations
https://docs.opencv.org/3.1.0/d7/d1b/group__imgproc__misc.html#gae8a4a146d1ca78c626a53577199e9c57
3、OpenCV threshold函数详解
https://blog.csdn.net/weixin_42296411/article/details/80901080
4、详细及易读懂的 大津法(OTSU)原理 和 算法实现
https://blog.csdn.net/u012198575/article/details/81128799
尊重原创技术文章,转载请注明。