单目相机IMU标定
该论文将相机IMU标定分为两个大方面:
一. 使用基函数来估计时间偏差
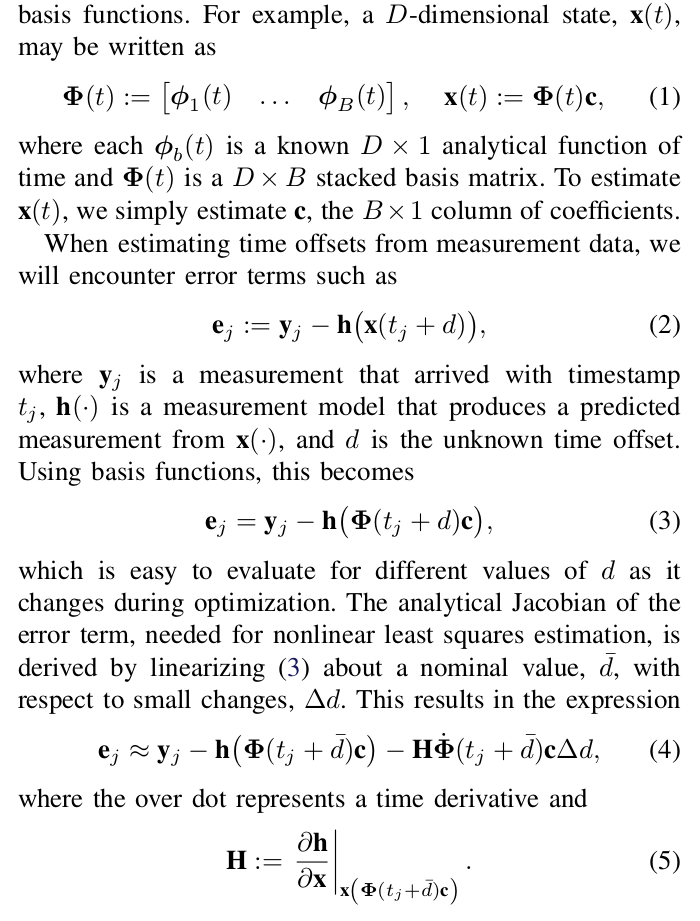
二. 相机和IMU的空间位置转换
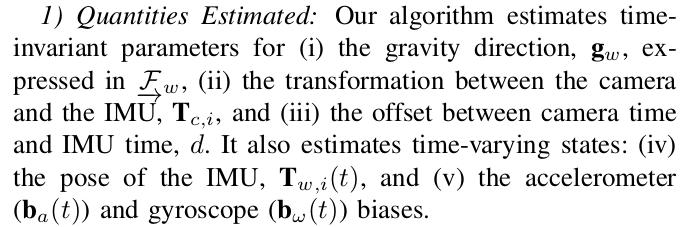
- 校准变量:重力、外参旋转和平移、时钟偏移、IMU位姿、加速度计偏置、陀螺仪偏置。
- 校准过程:
(1) 校准前有如下假设:
a. 相机内参已知
b. IMU噪声和偏置模型已知
c. 对重力有个初始猜测值
d. 对外参有个初始估计值
e. 标定板的参数是知道的,所以我们可以算出每个标志点的空间位置
f. 知道像素点和空间点的对应关系
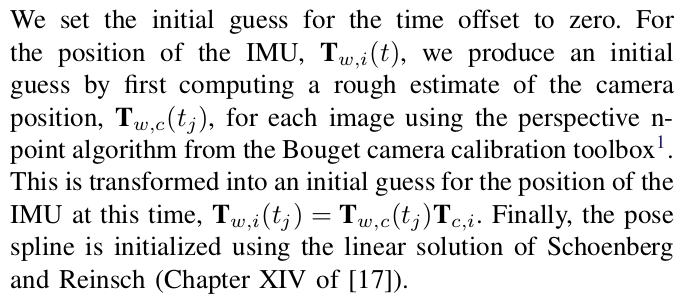
(2) IMU位姿使用6阶B样条来表示,首先通过如下过程初始化IMU位姿样条:
样条参数与IMU位姿的变化关系如下(随时间变化的IMU位姿参数化):

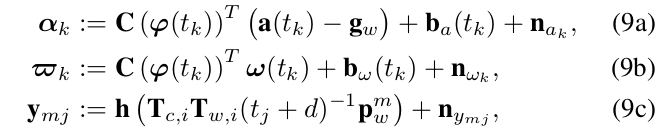
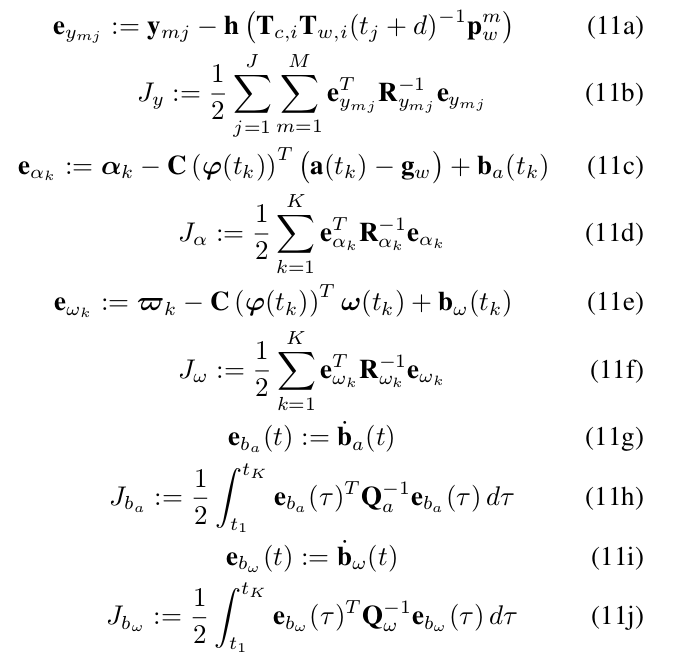
(3) 计算公式:
(4) 估计器
三. 总结
- 使用B样条的方法,对imu位姿进行微分,再与测量值比较,最小化误差。
- 利用相机IMU外参的初始估计值来初始化IMU位姿样条。
- 本文贡献:
a. 我们提出了一种统一的方法,使用批量,连续时间,最大似然估计确定传感器之间的固定时间偏移;
b. 推导出用于校准摄像机和惯性测量单元(IMU)的估计器,其同时确定摄像机和IMU之间的变换和时间偏移;
c. 证明了时间延迟估计显着受益于加速度测量中包含的附加信息 - 在以前的方法中未被利用的信息([5],[6])。
参考文献:
[1] Unified Temporal and Spatial Calibration for Multi-Sensor Systems