1. 密度聚类概念
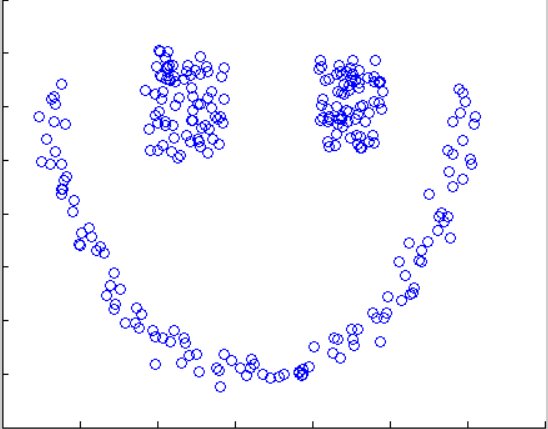
DBSCAN(Density-Based Spatial Clustering of Applications with Noise,具有噪声的基于密度的聚类方法)是一种很典型的密度聚类算法,和K-Means,BIRCH这些一般只适用于凸样本集的聚类相比,DBSCAN既可以适用于凸样本集,也可以适用于非凸样本集。
2. 密度聚类步骤
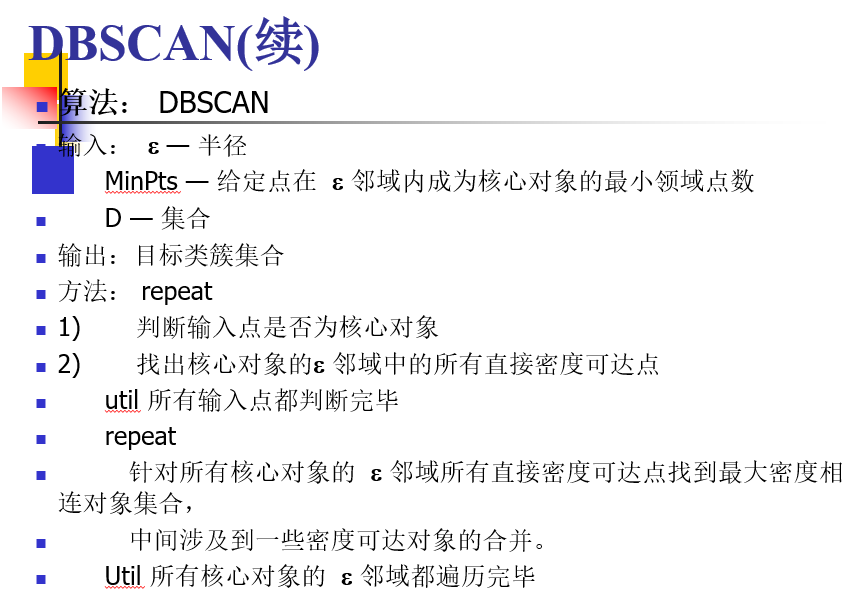
这个算法的关键是理解几个概念:
- 直接密度可达
- 密度可达
- 核心点
- 边界点
- 噪声点

# coding:utf-8
"""
@author = LPS
"""
import numpy as np
import matplotlib.pyplot as plt
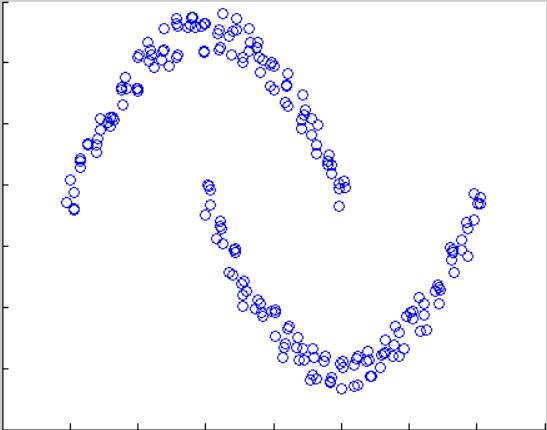
data = np.loadtxt('moon.txt')
n,m = data.shape
all_index = np.arange(n)
dis = np.zeros([n,n])
data = np.delete(data, m-1, axis=1)
def dis_vec(a,b): # 计算两个向量的距离
if len(a)!=len(b):
return Exception
else:
return np.sqrt(np.sum(np.square(a-b)))
for i in range(n): # 计算距离矩阵
for j in range(i):
dis[i,j] = dis_vec(data[i],data[j])
dis[j,i] = dis[i,j]
def dbscan(s, minpts): # 密度聚类
center_points = [] # 存放最终的聚类结果
k = 0 # 检验是否进行了合并过程
for i in range(n):
if sum(dis[i] <= s) >= minpts: # 查看距离矩阵的第i行是否满足条件
if len(center_points) == 0: # 如果列表长为0,则直接将生成的列表加入
center_points.append(list(all_index[dis[i] <= s]))
else:
for j in range(len(center_points)): # 查找是否有重复的元素
if set(all_index[dis[i] <= s]) & set(center_points[j]):
center_points[j].extend(list(all_index[dis[i] <= s]))
k=1 # 执行了合并操作
if k==0 :
center_points.append(list(all_index[dis[i] <= s])) # 没有执行合并说明这个类别单独加入
k=0
lenc = len(center_points)
# 以下这段代码是进一步查重,center_points中所有的列表并非完全独立,还有很多重复
# 那么为何上面代码已经查重了,这里还需查重,其实可以将上面的步骤统一放到这里,但是时空复杂的太高
# 经过第一步查重后,center_points中的元素数目大大减少,此时进行查重更快!
k = 0
for i in range(lenc-1):
for j in range(i+1, lenc):
if set(center_points[i]) & set(center_points[j]):
center_points[j].extend(center_points[i])
center_points[j] = list(set(center_points[j]))
k=1
if k == 1:
center_points[i] = [] # 合并后的列表置空
k = 0
center_points = [s for s in center_points if s != []] # 删掉空列表即为最终结果
return center_points
if __name__ == '__main__':
center_points = dbscan(0.2,10) # 半径和元素数目
c_n = center_points.__len__() # 聚类完成后的类别数目
print (c_n)
ct_point = []
color = ['g','r','b','m','k']
noise_point = np.arange(n) # 没有参与聚类的点即为噪声点
for i in range(c_n):
ct_point = list(set(center_points[i]))
noise_point = set(noise_point)- set(center_points[i])
print (ct_point.__len__()) # 输出每一类的点个数
print (ct_point) # 输出每一类的点
print ("**********")
noise_point = list(noise_point)
for i in range(c_n):
ct_point = list(set(center_points[i]))
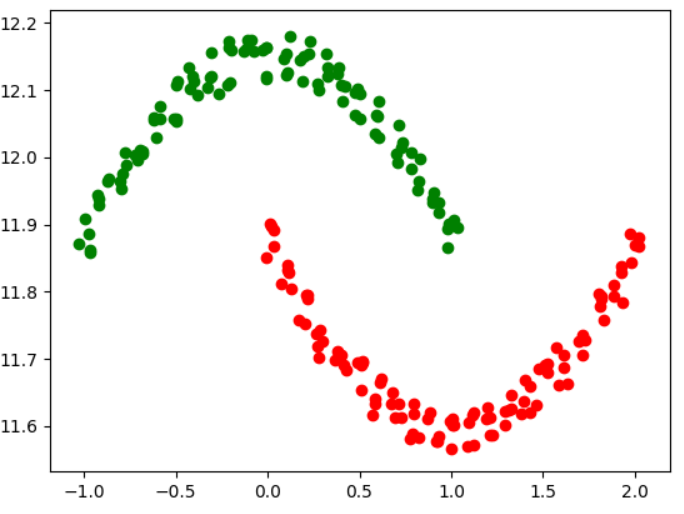
plt.scatter(data[ct_point,0], data[ct_point,1], color=color[i]) # 画出不同类别的点
plt.scatter(data[noise_point,0], data[noise_point,1], color=color[c_n], marker='h', linewidths=0.1) # 画噪声点
plt.show()
DBSCAN的主要优点有:
1) 可以对任意形状的稠密数据集进行聚类,相对的,K-Means之类的聚类算法一般只适用于凸数据集。
2) 可以在聚类的同时发现异常点,对数据集中的异常点不敏感。
3) 聚类结果没有偏倚,相对的,K-Means之类的聚类算法初始值对聚类结果有很大影响。
DBSCAN的主要缺点有:
1)如果样本集的密度不均匀、聚类间距差相差很大时,聚类质量较差,这时用DBSCAN聚类一般不适合。
2) 如果样本集较大时,聚类收敛时间较长,此时可以对搜索最近邻时建立的KD树或者球树进行规模限制来改进。
3) 调参相对于传统的K-Means之类的聚类算法稍复杂,不同的参数组合对最后的聚类效果有较大影响。
实验:
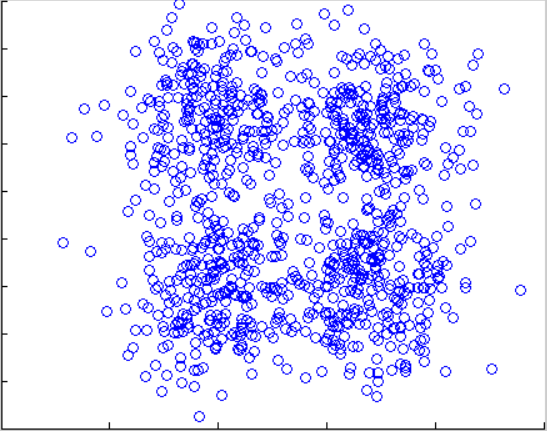

原图 square4 e=0.85 minpts = 13 square4-sklearn e=0.9 minpts=15
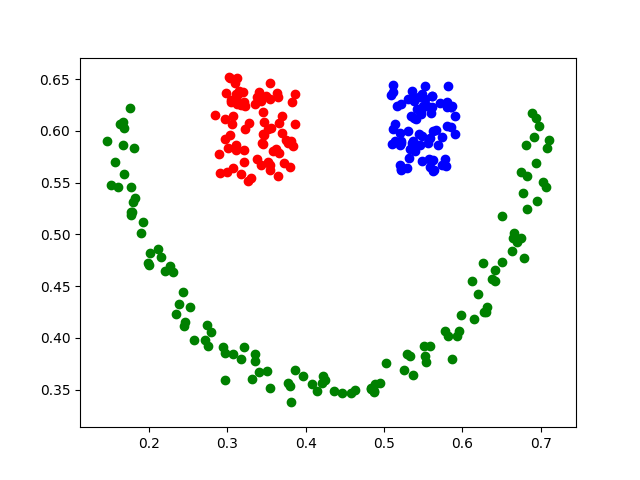
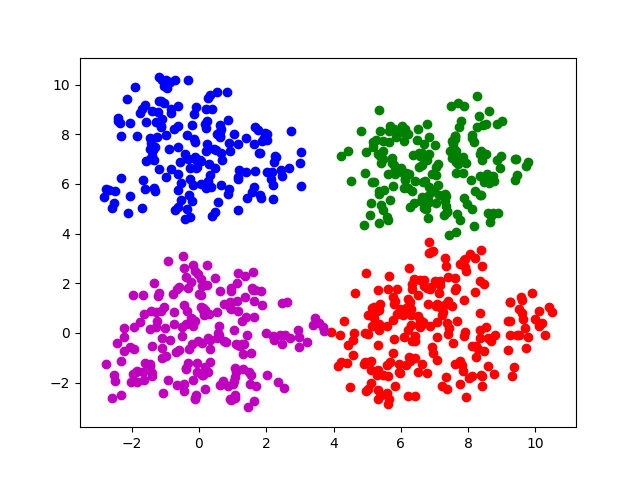
原图 结果图



原图 square1 1.185,8 square1 0.85 15

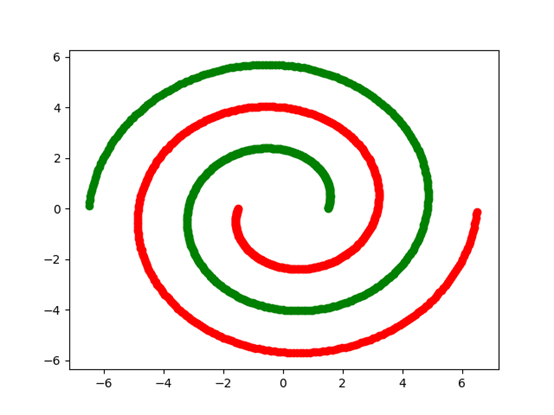
原图 结果图
原图 结果图
实验过程中:前几幅图由于分布比较密集,参数调整要很多次,后几张图因为分布比较分散,所以参数基本一次设置成功。
结果和资料已上传,下载~~~