创建工作环境
创建文件夹,创建包
mkdir -p ~/catkin_arduino_ros/src catkin_create_pkg test1_pub_sub std_msgs rospy roscpp
在桌面打开终端,添加工作路径
echo "source /home/dongdong/catkin_arduino_ros/devel/setup.bash" >> ~/.bashrc source ~/.bashrc
创建项目文件
1创建src/talker.cpp文件
cd ~/catkin_arduino_ros/src gedit talker.cpp
复制代码
#include "ros/ros.h"
#include "std_msgs/String.h"
#include <sstream>
int main(int argc, char **argv)
{
ros::init(argc, argv, "talker");
ros::NodeHandle n;
ros::Publisher chatter_pub = n.advertise<std_msgs::String>("chatter", 1000);
ros::Rate loop_rate(10);
int count = 0;
while (ros::ok())
{
std_msgs::String msg;
std::stringstream ss;
ss << "hello world " << count;
msg.data = ss.str();
ROS_INFO("%s", msg.data.c_str());
chatter_pub.publish(msg);
ros::spinOnce();
loop_rate.sleep();
++count;
}
return 0;
}
保存
2创建src/listener.cpp文件
gedit listener.cpp
复制源代码
#include "ros/ros.h"
#include "std_msgs/String.h"
void chatterCallback(const std_msgs::String::ConstPtr& msg)
{
ROS_INFO("I heard: [%s]", msg->data.c_str());
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "listener");
ros::NodeHandle n;
ros::Subscriber sub = n.subscribe("chatter", 1000, chatterCallback);
ros::spin();
return 0;
}
编译节点
更改编译文件
在CMakeLists.txt文件末尾加入几条语句:
include_directories(include ${catkin_INCLUDE_DIRS})
add_executable(talker src/talker.cpp)
target_link_libraries(talker ${catkin_LIBRARIES})
add_executable(listener src/listener.cpp)
target_link_libraries(listener ${catkin_LIBRARIES})
编译
cd ~/catkin_arduino_ros/ catkin_make
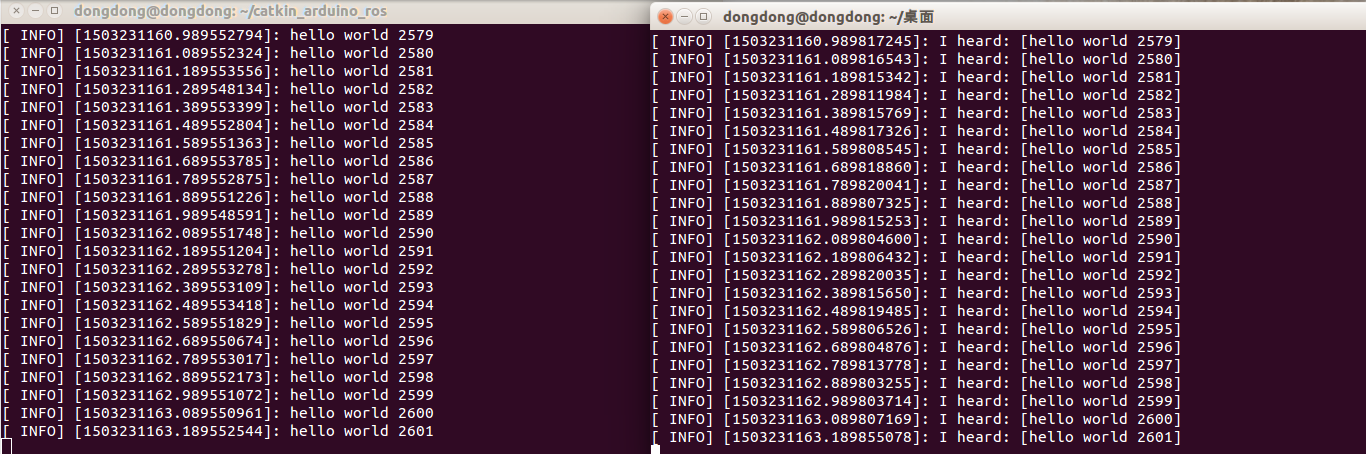
运行节点
//分别打开三个窗口 roscore rosrun test1_pub_sub talker rosrun test1_pub_sub listener