最近做课设,选了电力线通讯这种途径,经过百度google等一番查询,最终敲定了mi200e这块国产芯片。
课设要求就是双机通讯,互传传感器信息以及模拟一个时钟
然后淘宝买了拆机的成品,我拿回来把mcu拆了然后飞出通讯端口和stm8交互。现在串口两边可以通讯了,下一步就是重新绘制一块完整的pcb,然后制版,并实现响应功能。
先上ref:
http://search.eefocus.com/s?app_id=90&sub=1&q=mi200e
这是电路城搜索mi200e得出的结果,我主要参考第一篇,他在嘉立创还有发帖,点进去你就找得到了。
他使用stm8主控并绘制整块pcb,我则使用以前的stm8核心小板。由于mi200e常规供电为5v,稍稍更改核心板为5v供电做好。
没有拍当时做的图片,上pcb和实物吧!

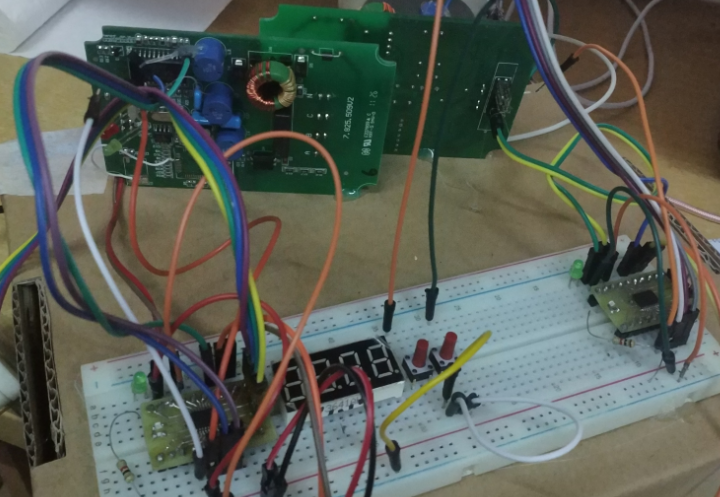
将右图放大后,可看到两块绿板,这两块就是成品模块,应用于智能抄表的。可看到左边那块上有一根小跳线,跳线右边哪里原来是块u,我用烙铁把他拆了。
不然stm8没法单独和mi200e通讯。至于为什么要跳那根线,我在网上恰好查到他的原理图,(应该是miartech官方的方案,然后抄的,原件丝印不同),mi200e的供电vdd受一个pmos控制,
所以直接将mos的g级接地。其实我买了两种,一共买了四块,连运费20+rmb。另一种的丝印是和原理图队上的。我后面会附上手头的资料。
两块板子背面其实有排针,原来用于接220v的,我直接把他们并联在一起,然后接了一根电源线。一方面因为我电源线紧张,另一方面固定在一块纸板上方便调试。

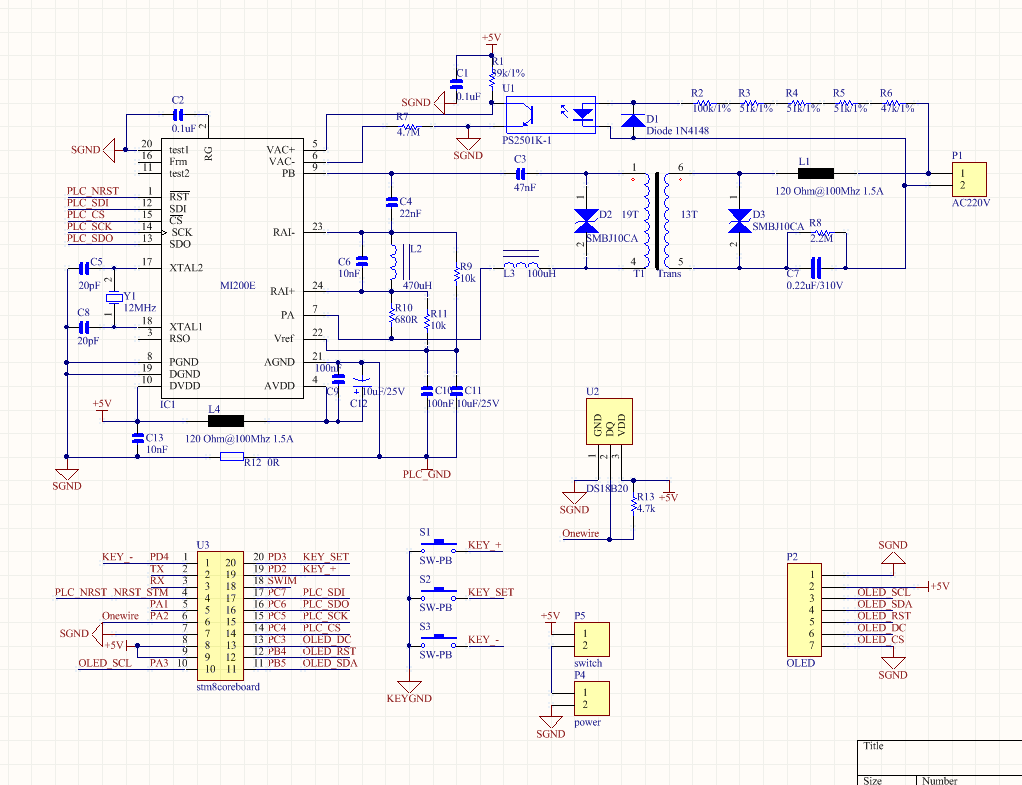
这是原理图,通讯接口是SPI,其中cs不能直接接地,因为数据是双向互传,并且不是单次传输。具体参考SPI接口flash的cs为什么不能直接接地吧。
我一开始想省io直接接地,结果调试的时候发现,自检过不了。
至于rst引脚,我把它接到stm8的nrst恰好可以使用,虽然官方应用笔记里面说要低电平1s后拉高。留待后面再测试吧。
这样就是4个io就能交互了。
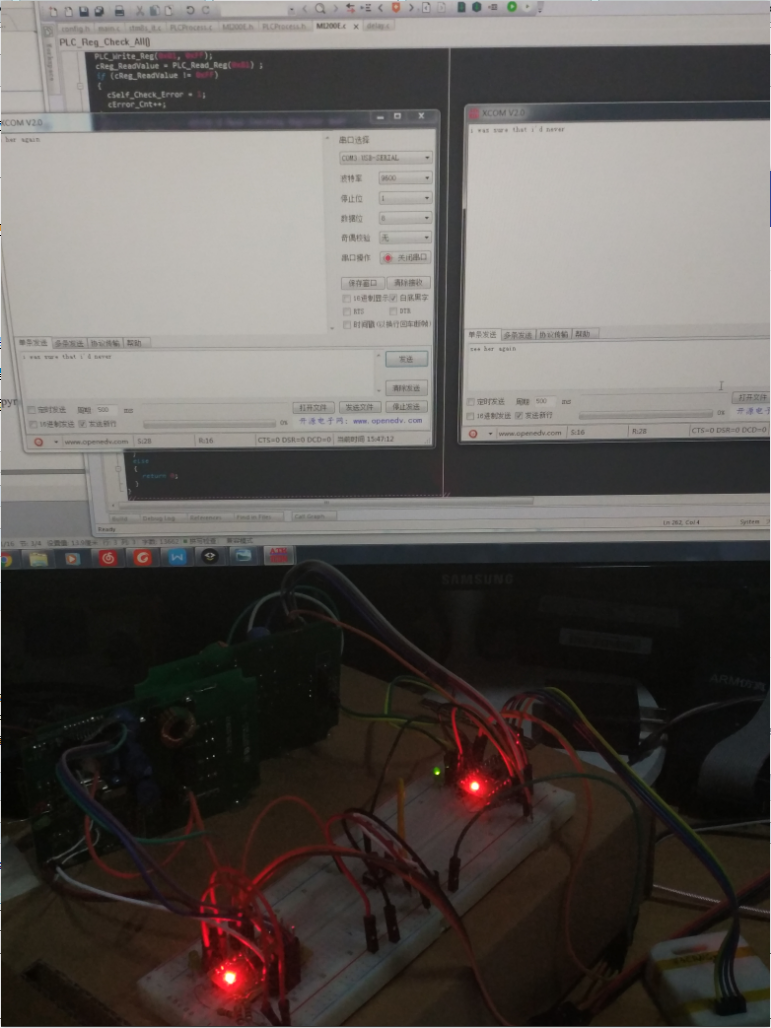
然后我按照嘉立创那篇帖子里的方案做了,然后一直调试,发现他的程序我直接用不了,数据通。
然后我发现省略了crc校验初步数据能够发送,但是有毛病。
没办法,又看手册,看应用笔记。以及对比另一个c51版本的程序
,这个程序从我给的链接里的第二篇可以下载到。但是这个只是驱动,应该就是这个产品用到的,但是没给全程序。我猜嘉立创那篇帖主
也是参考这个改的,因为驱动大体一致。我同时看笔记,以及两篇驱动,最后经过一番修改,然后下进去竟然就可以工作了。
程序限制它64字节,对于一般应用足够了。
说一下这块芯片的发送过程,两个引导字节(一个字),一个固定字节,然后配置字节(速率和字长,字为单位)。到这里都是固定200/240bps速率(会因交流电频率不同而不同),之后的速率可自行配置,
程序里设定的是1600/1920bps。然后是以字为单位的数据(这里就是串口透传,由于是字对齐,所以必须是偶数字节,这里要注意!),最后一个字的CRC校验。
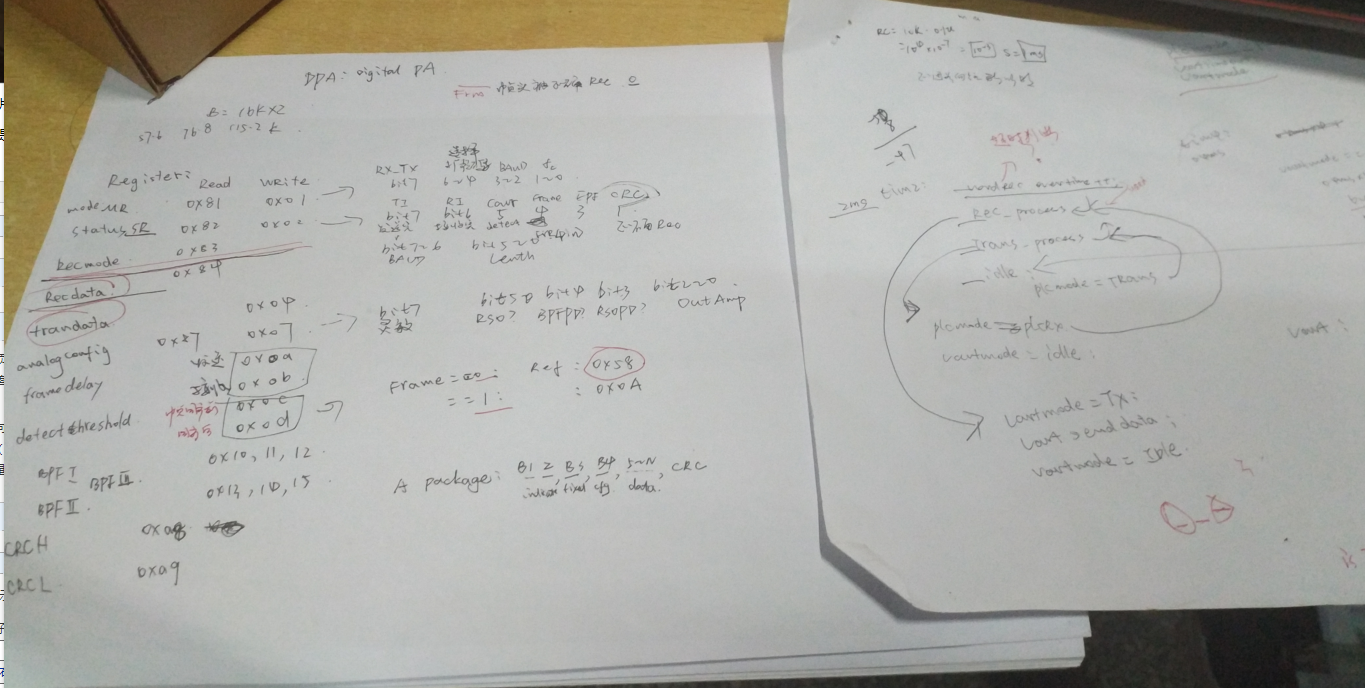
附上一张笔记图,看别人的代码真是不容易啊。这里双向能通讯了,后面再看要不要他程序的框架,如果要,还有更多细节要明白。
和硬件打交道,如果不懂的话,可能就是一个延时你就要消耗大把时间。所以需要日积月累!


1 #include "stm8s.h" 2 #include "config.h" 3 #include "MI200E.h" 4 #include "PLCProcess.h" 5 6 unsigned char g_cStatusReg; 7 unsigned char g_cRecModCfgReg; 8 unsigned short PLC_Word_Rec_Overtime; 9 unsigned char g_bRecv_Pkg_Flag; 10 unsigned char g_CRC_H,g_CRC_L; 11 unsigned char g_cPkg_Length = 0; 12 unsigned char g_Pkg_Indication_Byte = 0; 13 unsigned char g_cTrans_Step; 14 unsigned char g_cRecv_Step; 15 unsigned char g_cRecByte_H; 16 unsigned char g_cRecByte_L; 17 unsigned char g_cSend_Data_Length; 18 unsigned char g_cSend_Byte_Cnt; 19 unsigned char g_cRecv_Byte_Cnt; 20 unsigned char g_Send_Buf[64]; 21 unsigned char g_Recv_Buf[64]; 22 23 24 void PLC_Send_Frame(unsigned char cWRData_H, unsigned char cWRData_L) 25 { 26 PLC_Write_Reg(PLCAddrWRSR,(g_cStatusReg&0x7F)); //Clear TI;Write Status Register:0x02 27 MI200E_SCK_0; 28 MI200E_CS_0; 29 Write_SPI(PLCAddrWRTB0); //Write Sending Byte Register 0:0x04 30 Write_SPI(cWRData_H); 31 Write_SPI(cWRData_L); 32 MI200E_SCK_0; 33 MI200E_CS_1; 34 } 35 36 void PLC_RD_Recv_Word(void) 37 { 38 MI200E_SCK_0; 39 MI200E_CS_0; 40 Write_SPI(PLCAddrRDRB0); //Read Receiving Byte Register 0:0x84 41 g_cRecByte_H = Read_SPI(); 42 g_cRecByte_L = Read_SPI(); 43 MI200E_SCK_0; 44 MI200E_CS_1; 45 } 46 47 unsigned char PLC_Clear_EPF(void) 48 { 49 unsigned char cStatusByte; 50 51 cStatusByte = PLC_Read_Reg(PLCAddrRDSR); //Read Status Register:0x82 52 PLC_Write_Reg(PLCAddrWRSR, (cStatusByte&0xF5)); //Clear EPF Flag & CRC_Flag;Write Status Register:0x02 53 return(cStatusByte); 54 } 55 56 57 void PLC_Transmit_Process(unsigned char* ptrData_Buffer) 58 { 59 unsigned char cStatusByte; 60 61 cStatusByte = PLC_Read_Reg(PLCAddrRDSR); //Read status register 62 if((cStatusByte&0x80) != 0x80) 63 { 64 return; 65 } 66 g_cStatusReg = cStatusByte;//**confirmed 67 switch(g_cTrans_Step) 68 { 69 case 0: 70 //Write Mode Cfg Reg, Code Length = 32, Data Rate = 200 bps; 71 PLC_Write_Reg(PLCAddrWRMR, 0x0D); //**0x0d changed to 0x0c;diff:carriar freq:76.5->57.6khz 72 PLC_Send_Frame(0xFF, 0xFF); //First 2 Byte:0xFF 0xFF 73 //Baud=1600bps + length(unit in words) 74 g_Pkg_Indication_Byte = (0x00 + g_cSend_Data_Length/2 + 2);//**why finially +2?? 75 g_cTrans_Step = 1; 76 break; 77 case 1: 78 //Initial CRC Bit;Write Status Register:0x02 79 PLC_Write_Reg(PLCAddrWRSR,(g_cStatusReg & 0xFD)); 80 //Send Header Byte:0x1a & Packet Indication Byte 81 PLC_Send_Frame(0x1A, g_Pkg_Indication_Byte); 82 g_cTrans_Step = 2; 83 break; 84 case 2: 85 //Write mode configuration; 86 PLC_Write_Reg(PLCAddrWRMR,0x01);//0b0000 00--1600/1920bps 01--76.8khz**00 57.6k 87 //Send 0x1f,0xff as MiarTech's PLC AMR Applications 88 PLC_Send_Frame(0x1F,0xFF);//**the word?? 89 g_cTrans_Step = 3; 90 g_cSend_Byte_Cnt = 0; 91 break; 92 case 3://Send Data(Unit in Word:16 Bytes) 93 if(g_cSend_Byte_Cnt >= (g_cSend_Data_Length - 2)) 94 { 95 g_cTrans_Step = 4; 96 } 97 PLC_Send_Frame(*ptrData_Buffer,*(ptrData_Buffer + 1)); 98 g_cSend_Byte_Cnt = g_cSend_Byte_Cnt + 2;//point to the next word 99 delay_us(80);//delay 50us and read crc 100 g_CRC_H = PLC_Read_Reg(PLCAddrRD_CRC_H); 101 g_CRC_L = PLC_Read_Reg(PLCAddrRD_CRC_L); 102 break; 103 case 4://Send CRC Code:16 Bytes 104 PLC_Send_Frame(g_CRC_H, g_CRC_L); 105 g_cTrans_Step = 5; 106 break; 107 case 5://transmit finished 0x81 108 PLC_Write_Reg(PLCAddrWRMR, 0x81); //Write mode configuration, 109 g_cRecByte_H = 0; 110 g_cRecByte_L = 0; 111 g_cRecv_Step = 0x00; 112 PlcRunMode = PLCRX; 113 UartRunMode = IDLE; 114 break; 115 default: 116 break; 117 } 118 } 119 120 121 void PLC_Receive_Process(unsigned char* ptrData_Buffer) 122 { 123 unsigned char cStatusByte; 124 unsigned char CRC_Correct_Flag; 125 // unsigned char temp,i; 126 // static unsigned short cnt; 127 128 129 if(g_cRecv_Step == 0x10)//Receive Process Initialization OK 130 { 131 g_cRecModCfgReg = PLC_Read_Reg(PLCAddrRDRR); //Read Receiving Mode Configuration Register(0x83) 132 cStatusByte = PLC_Read_Reg(PLCAddrRDSR); 133 if(g_cRecModCfgReg != 0x00) //Have Received Spread Spectrum&Packet Length 134 { 135 PLC_Write_Reg(PLCAddrWRRR,0x00); //Clear Receiving Mode Configuration Byte 136 g_cPkg_Length = (0x3f & g_cRecModCfgReg); //Packet Length = g_cRecModCfgReg[5:0] 137 g_cRecv_Step = 0x01; 138 PLC_Word_Rec_Overtime = 0; 139 } 140 if(((cStatusByte & 0x30) != 0x30)||(PLC_Word_Rec_Overtime > 500)) //Receive Overtime >=1 Second 141 { 142 CRC_Correct_Flag = PLC_Clear_EPF(); 143 g_cRecv_Step = 0x00; 144 return; 145 } 146 } 147 else if(g_cRecv_Step == 0x00) 148 { //0x81 149 PLC_Write_Reg(PLCAddrWRMR, 0x81);//bit[0]--bit[3] 00--1600/1920bps 01--76.8khz 150 cStatusByte = PLC_Read_Reg(PLCAddrRDSR); 151 g_cStatusReg = cStatusByte; 152 if((g_cStatusReg & 0x20 ) == 0x20)//Read Carrier Detected Flag 153 { 154 if((g_cStatusReg & 0x10) == 0x10)//Read Frame Indicate Flag 155 { 156 //Clear Receiving Mode Configuration Byte 157 //PLC_Write_Reg(PLCAddrWRRR, 0x00);//datasheet?? 158 g_bRecv_Pkg_Flag = 0;//*(*? 159 g_cRecv_Step = 0x10; 160 PLC_Word_Rec_Overtime = 0; 161 } 162 } 163 } 164 else 165 { 166 cStatusByte = PLC_Read_Reg(PLCAddrRDSR); 167 g_cStatusReg = cStatusByte; 168 169 //Carrier Detected & Frame Indicate Flag is not Correct 170 if(((cStatusByte & 0x30) != 0x30)||(PLC_Word_Rec_Overtime > 500)) 171 { 172 g_cRecv_Step = 0x00; 173 CRC_Correct_Flag = PLC_Clear_EPF(); 174 return; 175 } 176 else 177 { 178 if((cStatusByte & 0x40) == 0x40)//Read Received Interrupt Flag.RI = 1:Received OK 179 { 180 PLC_Word_Rec_Overtime = 0; 181 // if(cnt == 0) 182 { 183 PLC_Write_Reg(PLCAddrWRSR,((g_cStatusReg & 0xBF)|0x02)); //Clear RI Flag & Set MI200_CRC 184 } 185 switch( g_cRecv_Step ) 186 { 187 case 0x01: //Read 0x1f,0xff as MiarTech's PLC AMR Applications 188 { 189 // cnt ++; 190 // if(cnt > 20) 191 // { 192 // cnt = 0; 193 // g_cRecv_Step = 0x00; 194 // return; 195 // } 196 // temp = PLC_Read_Reg(PLCAddrRDSR); 197 // if((temp&0x70) != 0x70) 198 // return; 199 // cnt = 0; 200 // 201 PLC_RD_Recv_Word(); 202 if((g_cRecByte_H == 0x1F) && (g_cRecByte_L == 0xFF)) 203 { 204 g_cRecv_Step = 0x02; 205 g_cRecv_Byte_Cnt = 0; 206 } 207 else 208 { 209 g_cRecv_Step = 0x00; 210 CRC_Correct_Flag = PLC_Clear_EPF(); 211 return; 212 } 213 } 214 break; 215 case 0x02: //read user data 216 { 217 // if(cnt == 0) 218 // { 219 // PLC_Write_Reg(PLCAddrWRSR,((g_cStatusReg & 0xBF )|0x02)); //Clear RI Flag & Set MI200_CRC 220 // } 221 // cnt ++; 222 // if(cnt > 20) 223 // { 224 // cnt = 0; 225 // g_cRecv_Step = 0x00; 226 // return; 227 // } 228 // temp = PLC_Read_Reg(PLCAddrRDSR); 229 // if((temp&0x70) != 0x70) 230 // return; 231 // cnt = 0; 232 233 if(g_cRecv_Byte_Cnt == (g_cPkg_Length - 3)) //1 for amr;1 for crc 234 { 235 g_cRecv_Step = 0x03; 236 } 237 PLC_RD_Recv_Word(); 238 239 *(ptrData_Buffer + g_cRecv_Byte_Cnt) = g_cRecByte_H; 240 *(ptrData_Buffer + g_cRecv_Byte_Cnt + 1) = g_cRecByte_L; 241 242 g_cRecv_Byte_Cnt++ ; 243 } 244 break; 245 case 0x03: //读取CRC数据 246 // cnt ++; 247 // if(cnt > 20) 248 // { 249 // cnt = 0; 250 // g_cRecv_Step = 0x00; 251 // return; 252 // } 253 // temp = PLC_Read_Reg(PLCAddrRDSR); 254 // if((temp&0x70) != 0x70) 255 // return; 256 // cnt = 0; 257 258 PLC_RD_Recv_Word(); 259 CRC_Correct_Flag = PLC_Clear_EPF(); 260 g_bRecv_Pkg_Flag = 1; 261 if ((CRC_Correct_Flag & 0x02) != 0x00) //CRC Flag Bit = 1;CRC is Correct 262 { 263 //串口发送 264 UartRunMode = TX; 265 unsigned char txlen; 266 txlen = (g_cPkg_Length-2)*2; 267 UsatrTxSub(g_Recv_Buf,txlen); 268 UartRunMode = IDLE; 269 } 270 g_cRecv_Step = 0x04; 271 break; 272 default: 273 break; 274 } 275 } 276 } 277 } 278 } 279 280 281 /******************************************************************************* 282 ** End Of File 283 *******************************************************************************/
主要修改的就是,这个文件了。后面有什么进展还会更新!
10/14日更新!
期间参照它的工程做了修改,重画原理图pcb,然后做手工板。
做了两块,对齐的一般但是能用,只是两块板硬件调试都花了很长时间。
第一块是花原理图的时候中间有个电容连线错了,参照成品一个原件一个原件对,找了很久。由于画图的时候,他在原理图边上,没注意它。
第二块是焊接一个电容,它可能被我烫坏了,造成mi200e经常开机过不了自检,也是图省事全部原件基本都是直接拆的成品上的,最后还是电容一个一个换下来才找到问题。
这里吸取教训,小电容再也不用拆机的!
上图:

实物:
top layer:(其实这面画的是bottom layer)
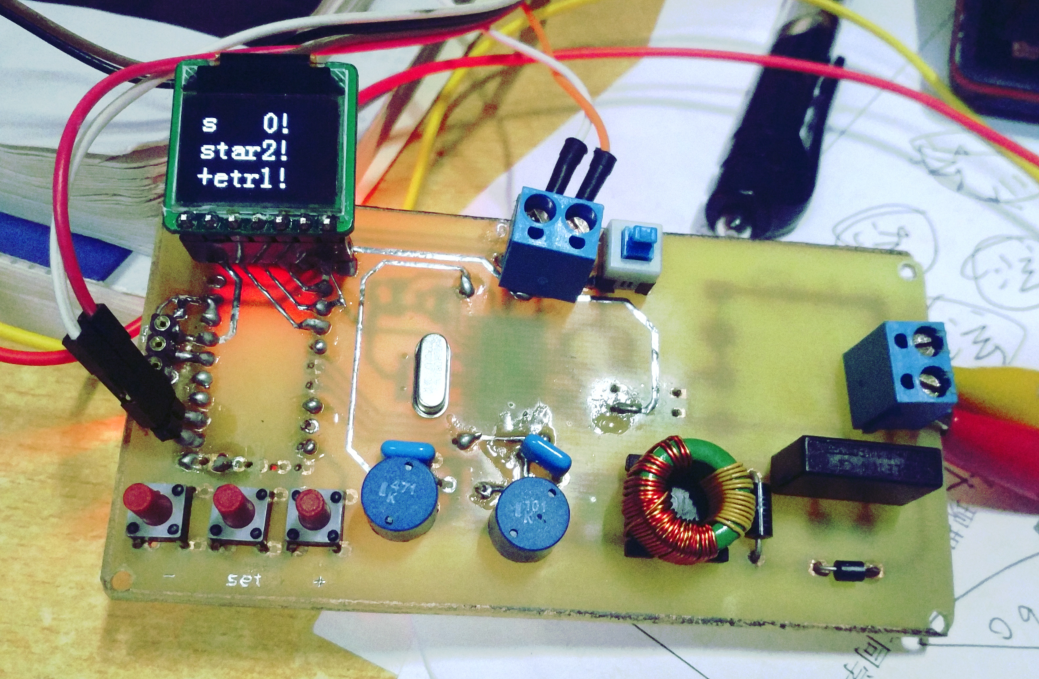

做出来有两个缺陷,一是该也不该用核心板,该是说方便更换,不该就是焊接很难受,布线也不好看,还变大了,不然可以小不少。
二就是oled,原来考虑是top layer就做最终顶层的,但是寻思直插放另一面合适,最终就把bottom当了顶层。这就导致oled必须换个方向插,
进而就得让它支出来。
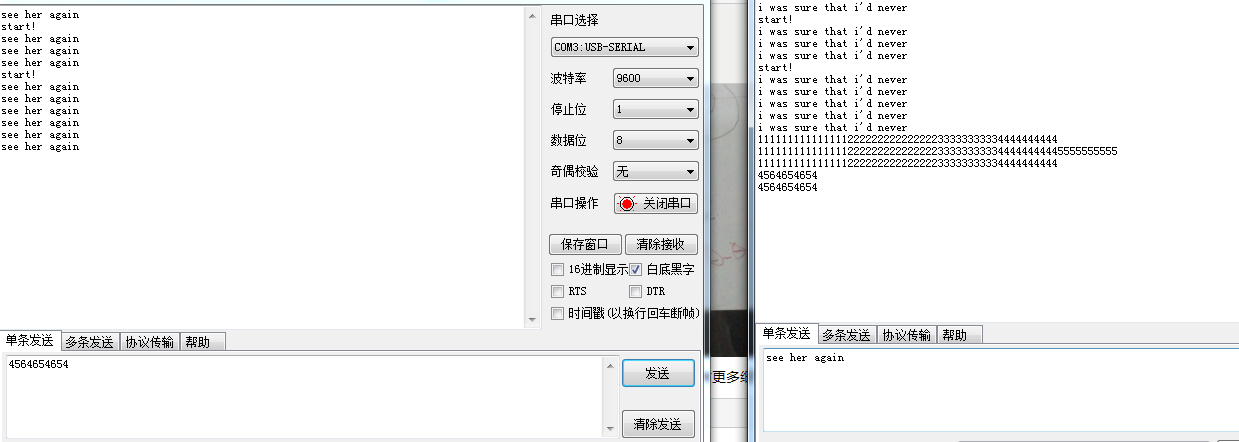
目前串口透传OK!距离尚未测试。
按键扫描OK!
OLED显示OK!
DS18b20(暂定传感器)程序写了,尚未测试,拿出以前的18b20插的时候引脚断了,因为生锈了。233
剩下的就是小结构以及模拟一个时钟
更新:2018年11月13日14:05:17
课设快结束了,器件程序调试了好几次,最终基本实现了功能。
调试时遇到主要BUG:
发送的数据不能是奇数字节,不然无法正常通信->改为偶数之后正常
原B板存在MI200E初始化失败情况,反复初始化之后一旦正确就一直正确-> 尝试过原件替换,无果。重新做了一块板,问题解决!

限于mcu的flash只有8k,导致程序写不下了,所以功能做了调整。
最终(暂定)功能:
A端:独立显示时间,读取18b20温度通过电力线发给B
B端:独立显示时间,通过电力线读取数据并显示温度,可以更改时间,可以校准A的时间。
尚有未完善的问题:如何用定时器精确微秒级延时供18b20使用
网上参考了很多方案,自己也调试了许多,效果都不理想。
最终使用原子的汇编延时,较准确。
这个问题留待后期解决。
由于没有铜柱,我简单打印了一个外壳(图里没有体现)。2333