作者:华为云EI专家厉天一
摘要:无人驾驶是通过自动驾驶系统,部分或完全的代替人类驾驶员,安全地驾驶汽车。汽车自动驾驶系统是一个涵盖了多个功能模块和多种技术的复杂软硬件结合的系统。本文将基于5G技术来探讨自动驾驶那点事。
人们越来越期望通过无人系统代替人类进行一些活动。小到帮助人们自动清扫地面的扫地机器人,大到进行战场态势感知协同作战的无人机,无人系统已经渗透到人类活动的方方面面。无人驾驶汽车作为其中之一,其市场需求非常广泛,从港口货运到乘用车驾驶种类繁多。近年来随着需求的推动,人工智能的火热,无人驾驶汽车领域取得很多技术突破,同时吸引更多投资以及科技力量的投入其中,使其成为一个朝气蓬勃的新兴技术领域[1-4]。
无人驾驶是通过自动驾驶系统,部分或完全的代替人类驾驶员,安全地驾驶汽车。汽车自动驾驶系统是一个涵盖了多个功能模块和多种技术的复杂软硬件结合的系统。在机器学习、大数据和人工智能技术大规模崛起之前,自动驾驶系统和其他的机器人系统类似,整体解决方案基本依赖于传统的优化技术。随着人工智能和机器学习在计算机视觉、自然语言处理以及智能决策领域获得重大突破,学术和工业界也逐步开始在无人车系统的各个模块中进行基于人工智能和机器学习的探索,目前已取得部分成果。而无人驾驶系统作为代替人类驾驶的解决方案,其设计思路和解决方法背后都蕴含了很多对人类驾驶习惯和行为的理解。现在,无人驾驶已经成为人工智能最具前景的应用之一[5-7]。
1 自动驾驶的相关工作
自动驾驶是一个系统性的复杂工作,一般是在传统汽车上进行加装来构建整个系统。下面引用通用汽车公司的Cruise自动驾驶汽车的硬件系统架构进行介绍[8],如图1所示,其他公司方案类似,可以清晰地看出,自动驾驶硬件系统主要包含五部分:感知模块、自动驾驶计算机、供电模块、信号通信模块、执行和制动模块。
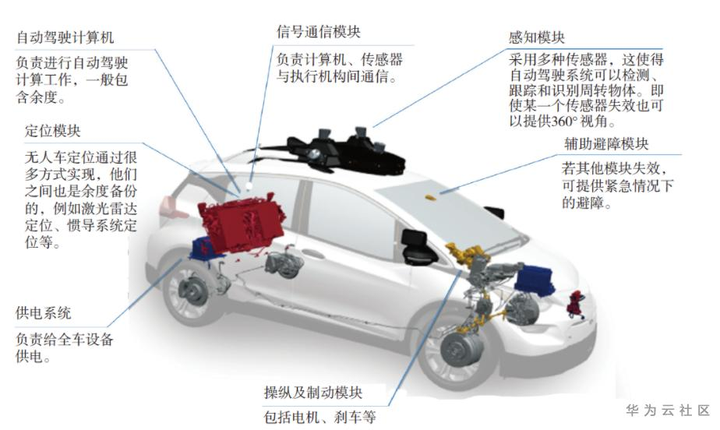
图1 自动驾驶硬件系统
Fig.1 Automatic driving hardware system
1.1 感知模块
自动驾驶硬件系统中的感知模块作为感知周围环境的重要途径,在规格和性能上有严格的要求,这是传统车辆所没有的。感知模块的主要作用是代替传统驾驶汽车中驾驶员的眼睛和耳朵,还有驾驶经验。通常由摄像头、激光雷达、毫米波雷达和GNSS/IMU组成。
摄像头相当于人类驾驶员的眼睛,主要用于获取图像信息,可用于识别行人、车、树、红绿灯、交通标志等物体,以便进行定位。相比之下,激光雷达通过接收的反射数据,可以获取更加丰富而准确的信息,如目标距离、方位、高度、速度、姿态、甚至形状等参数,从而对目标进行探测、跟踪和识别以及更加准确的定位,其三维测距原理是通过测量激光信号的时间差、相位差确定距离,通过水平旋转扫描测角度,并根据这两个数据建立二维的极坐标系,再通过获取不同俯仰角度的信号获得第三维的高度信息。激光获取的数据信息经过识别分类标注不同颜色处理后得到的可视化信息如图2所示。
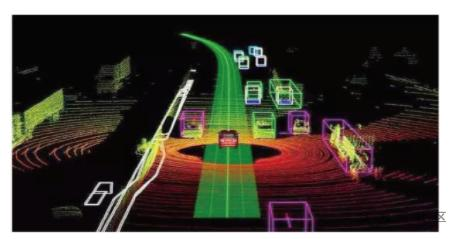
图2 激光雷达获取信息示意图
Fig.2 Schematic diagram of lidar information acquisition
毫米波雷达工作频率为一般为24GHz和77GHz,通过获取反射数据,可用于识别障碍物和测距。与其他主流雷达相比,毫米波雷达性能更佳,不受目标物体形状颜色和大气紊流的影响,具有很好的稳定的探测性能,环境适应性好。对于日常驾驶可能遇到的恶劣天气有很好的容错性,受天气和外界环境的变化的影响小,在实际应用中,对于雨雪天气、灰尘、阳光都有很强的适应。而且多普勒频移大,测量相对速度的精度提高,很适合自动驾驶高精度定位、识别等功能,对自动驾驶的工程应用有很大的促进作用[9]。 GNSS/IMU组合则用于实时获取全局位置信息。
1.2 自动驾驶计算机
自动驾驶计算负责进行自动驾驶相关的计算处理,一般主要包含五部分:CPU、GPU、内存、硬盘存储空间和硬件接口。目前还有专门用于加速计算的专用处理器。
其中,根据CPU的性能特点,主要用于通用计算,处理逻辑判断、进行流程控制以及规划,GPU用于并行计算,完成大规模大量同类型数据的计算,例如物体识别、分类处理等,一般是作为深度学习的部署使用,目前还有专门的处理器的替代方案,对矩阵运算做了专门的优化设计,提升计算效率,获得较高的能效比,比如华为的昇腾系列处理器。内存用于大量数据处理、加载高精度地图,对系统整体运行速度有较大影响。硬盘存储空间用于存储高精度地图和相关的应用数据。丰富的硬件接口,例如串口、CAN、以太网、USB等,多用于各种传感器连接。
1.3 执行与制动模块
执行与制动对于驾驶安全至关重要,执行与制动系统也在随着自动驾驶技术的不断发展而取得了长足的进步。执行系统接收自动驾驶控制模块根据融合决策做出的车辆的具体执行指令,控制车辆动力(油门和档位)、底盘(转向和制动)和电子电器等系统的执行,实现自动驾驶的速度和方向控制。相比之下,传统的汽车底盘制动系统是液压、气压制动,为了实现车身框架的稳定并将智能驾驶功能延伸,线控制动将是汽车制动技术的长期发展趋势,线控制动可以深度融合智能驾驶功能模块。这一趋势类似于航空领域飞行操纵系统由液压逐步转换为电传操纵系统的过程。
1.4 自动驾驶软件系统架构
整体而言,自动驾驶硬件系统是在传统车辆硬件标准配置的基础上,为更好满足自动驾驶的需要,进行了加装升级。
相比之下,与之相配套的软件系统是全新设计的,相当于人类的大脑,负责在融合各种传感器信息和先验知识的前提下,做出安全合理的决策,按功能主要分四个模块:定位、感知、规划、控制。其中定位模块是基础,各模块包含内容如图3所示。
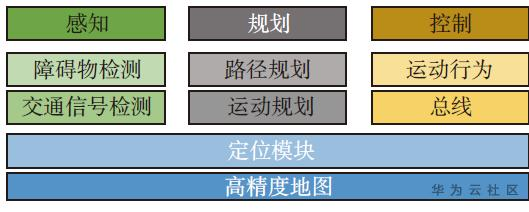
图3 自动驾驶软件系统架构
Fig.3 Architecture of automatic driving software system
其中,定位解算依赖高精度地图的辅助,基于定位信息可以开展环境感知、路径规划驾驶行为决策以及汽车运动控制等内容,而路径规划、行为决策以及运动控制相互联系,环环相扣,前一个输出可以作为后一个的输入条件来使用。简而言之,控制模块可以将决策规划的动作作为输入,计算应该执行的转弯角和控制的油门。
1.5 定位
定位包括车辆自身在周围环境的定位和对周围物体的定位,这是进行决策的重要前提和信息。为满足自动驾驶需求,目前自动驾驶定位精度最低要求为10cm,一般来讲,很难通过单一解决方案达到高精度的定位,主要是通过多传感器以及高精度地图融合的方式,主流方案是GNSS、IMU、激光雷达、相机、高精度地图融合。其中卫星导航系统(Global Navigation Satellite System,GNSS)主要提供粗略的绝对位置(经纬度),然后根据采集自身所在环境的激光雷达数据和相机数据与高精度地图匹配得到更精确的定位。IMU(Inertial Measurement Unit)惯性器件提供状态估计算法中状态方程(预测)中的加速度、角速度。
来自百度公司的自动驾驶团队采用的定位方案框图如图4所示。这是目前比较常见且有效的定位算法架构。定位算法的研究难点在于一些微小的处理与改变可能引起较大的精度差距。所以,不断有研究人员在定位算法上深耕突破。
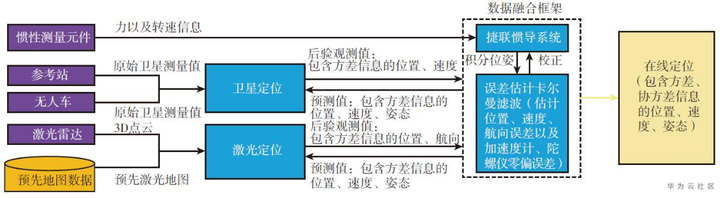
图4 定位算法实施框图
Fig.4 Block diagram of localization algorithm implementation
1.6 高精度地图
在定位方案中,高精度地图起到了举足轻重的作用。高精度地图是通过高精度激光雷达、相机、GNSS等传感器获取道路信息数据。一般来讲,传感器数量越多,信息覆盖越全面,精度也就越高,高精度地图就越精确。在自动驾驶使用时,可将其表示为计算机语言的形式存储在自动驾驶计算机的硬盘当中,驾驶过程中通过实时与高精度地图比对来获得高精度定位[10]。
高精度地图通常需要预先建立,在建立过程中存在大量的分类问题,花费巨大,多数开销在传感器系统上。由于采集的数据庞大,格式多样,维度较多,一般通过人工智能算法进行数据处理。高精度地图主要包含车道经纬度、车道宽、曲率、高程、车道交叉口位置、宽度、曲率、信号灯位置、道口数、标牌位置以及含义等。目前主要是通过深度学习的方法进行处理,在计算机视觉领域采用卷积神经网络(Convolution Neural Network,CNN)使问题得到很好的解决。
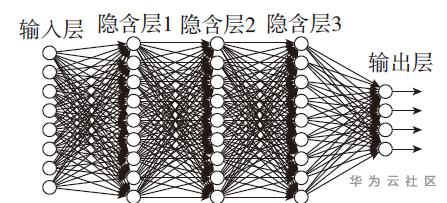
图5 神经网络示意图
Fig.5 Schematic diagram of neural network
卷积神经网络通常由一个或多个卷积层和全连接层组成,卷积层执行的计算包含卷积操作和池化操作。卷积计算是通过不同窗口数据和滤波矩阵(一组固定的权重)做内积(逐个元素相乘再求和)的操作得到卷积后的数据;池化计算将数据分块,每个数据块以最大值或求平均值作为数据块的代表值。具体操作示意图如图6所示。
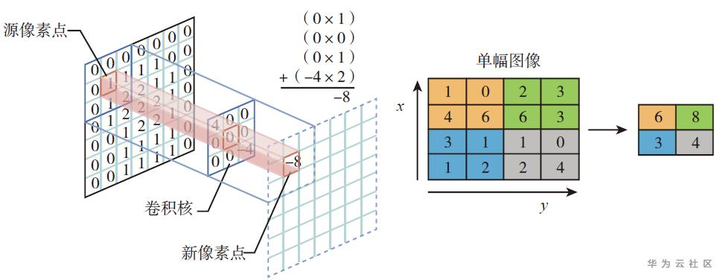
图6 卷积(左)和池化(右)操作示意图
Fig.6 Schematic diagram of convolution (left) and pooling (right) operations
卷积神经网络算法还有一个特性是权值共享,即对于一幅图片上每个点,在某一层的卷积操作权值是相同的,卷积神经网络训练的参数转化为训练滤波矩阵(卷积核),参数量大幅度减少。卷积神经网络就是通过多个卷积层得到不同方向上的几何信息特征,通过提取这些特征,得到输入数据的相关性,通过考虑这些相关性减少训练复杂度,该方法在图像和语音处理上具有很好的应用。
1.7 感知和规划
感知和规划相辅相成,互为补充。特别是在线进行环境感知,要对采集的数据进行在线实时识别、分类,主要挑战在于输入数据是动态的,不确定的,具有很强的突发性和偶然性,具有很大的挑战性。
规划问题是根据感知的动态环境与对运动体的预测情况进行运动序列决策。自动驾驶要求在复杂环境下做出快速而准确的决策判断,可以设想通过一个极其复杂的路口对规划问题的考验,是体现自动驾驶智能程度的关键问题。传统的路径规划算法对复杂动态环境并不适用,时间复杂度高,而强化学习是解决序列决策问题的好方法,目前在解决自动驾驶规划问题上有很好的仿真验证。强化学习是与监督学习、无监督学习平级的机器学习的一个分支,来源于动物学习心理学,最早可追溯到巴普洛夫的条件反射试验,通过反馈获得成效的评价来不断提高学习效果[11]。
1.8 控制
控制的任务是消化上层动作规划模块的输出轨迹点,通过一系列动力学计算转换成对车辆油门、刹车以及方向盘的具体的控制信号,从而尽可能地控制车去实际执行这些轨迹点。该问题一般转化为找到满足车辆动态姿态限制的方向盘转角控制(车辆横向控制)和行驶速度控制(车辆纵向控制)。 对这些状态量的控制可以使用经典的PID控制算法,但其对模型依赖性较强,误差较大。智能控制算法,如模糊控制、神经网络控制等,在自动驾驶控制中也得到广泛研究和应用。其中,神经网络控制利用神经网络,把控制问题看成模式识别问题,被识别的模式映射成“行为”信号的“变化”信号,取得了较好的效果,甚至可以用驾驶员操纵过程的数据训练控制器获取控制算法,具有广阔的应用前景[12]。
2 5G的启示与机遇
自动驾驶分为6个等级,具体如图7所示,目前真正应用到实际生活中可达到Level 3,主要是基于汽车本地端的传感器进行数据融合从而做出决策的,有一定局限性,限制了向更高等级发展,因为在道路环境异常复杂的情况下,摄像头和激光雷达等本地传感器受限于视距、环境等因素影响,无法做到很高的安全性,比如当汽车以130 km/h的速度行驶时,摄像机和雷达无法安全检测到前方超过120米的停车,这将触发紧急制动,这显然是无法接受的。如何需要弥补这种不足,让自动驾驶看的更远是研究人员面临的一个难题。
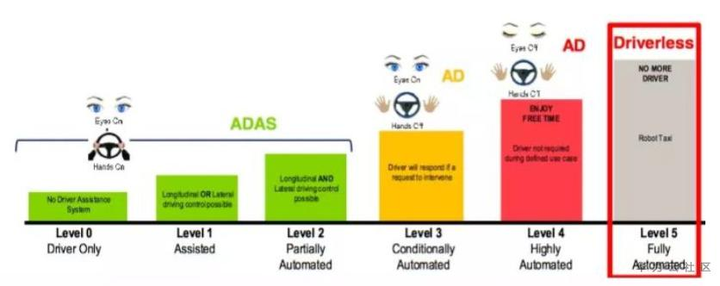
图7 自动驾驶等级划分图
Fig.7 Automatic driving classification chart
2.1 5G下的自动驾驶方案V2X
目前业界主要采用的是C-V2X,这是一种基于蜂窝网络的技术,不仅支持现有的LTE-V2X应用,还支持5G V2X的应用,如图8所示。基于强大的3GPP生态系统和连续完善的蜂窝网络覆盖,预计可大幅降低自动驾驶和车联网部署成本,很有可能成为5G时代最先成功的垂直行业应用场景[13]。
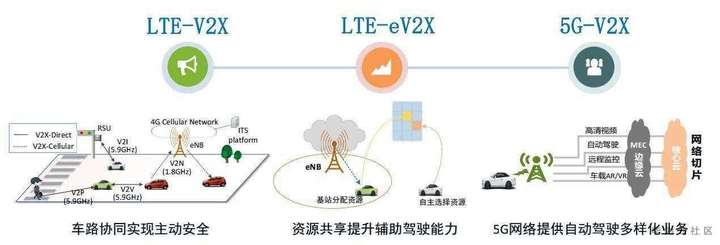
图8 V2X演进过程
Fig.8 V2X evolution
与激光雷达等传感器不同,V2X可视为一种无线传感器系统的解决方案,允许车辆通过通信信道彼此分享信息,检测潜在危险,扩大自动驾驶感知范围,从而进一步提升自动驾驶的安全性和舒适性。比如道路前方弯道处停有一辆抛锚的汽车,但正好处于弯道处,这时基于汽车本地的传感器较难检测到,而V2X可以通过网络共享信息,将抛锚车辆信息传送给正在行驶的车辆。
5G作为重要的通讯载体,意义重大,特别是短延迟特性使实时通信不再是遥不可及,高可靠低时延业务,很适合自动驾驶领域。而要达到自动驾驶L5需要超高可靠低时延的指标,甚至由于物联网各种传感器太多,或许还需要mMTC(海量机器类终端通信),而URRLC和mMTC是5G标准最后落地的标准。与互联网“尽力而为”的数据传输方式不同,5G提供始终如一的低延时和高速率服务保障,这对安全性要求极高的无人驾驶意义重大,比如当汽车行驶在网络拥塞区域的时候,仍然可以获得网络通信保证。
5G核心网控制面与数据面分离,NFV令网络部署更加灵活,从而使分布式的计算边缘部署,将更多的数据计算和存储从核心下沉到边缘,距离数据更近,从而降低时延和网络负荷,同时提升了数据安全性和隐私性。
值得一提的是,即使是在没有4G/5G网络覆盖的环境下,C-V2X还是可以利用PC5接口进行彼此通信。
2.2 5G带来的机遇
对于无人驾驶中核心技术——高精度地图也有很大的帮助。高精度地图通过对周围静态的环境进行精确描述,来延伸传感器的感知范围,以更为精细的尺度帮助汽车了解所处的位置、周围的环境状况、应该如何进行下一步操作等定位决策问题。
相比传统导航地图,高精度地图的图层更多,地图信息量更大。从图层数量上看,包含诸如道路级别、交通设施等更多的数据。从图层质量上看,高精度地图每一图层的描绘更精细,从而可以实现厘米级导航。高精地图提供自动驾驶所需专用道路信息,除了拥有传统导航地图具备的道路形状,通行方向,车道等信息,还包含了诸如车道分隔物类型、交通标志、限速等信息,和一些道路几何的三维信息,像弯道、斜坡等。庞大的数据集在存储、处理和传输方面都是一个挑战,特别是传输更新方面,因为高精地图需要实时更新,通过传感器、摄像头采集到的信息通过通讯手段与云端做交互,能使得地图更加智能。基于智能地图信息的路径规划,通行效率更高,5G的高带宽、低延时特性使得这一切成为可能。
另一方面,高精地图的数据量巨大,达到Gbit/km级别或以上,以尽量少的时间完成更新,需要超高速带宽支撑,这也是5G网络才能提供的。
最后,高精地图可以提供一幅雷达和视觉探测距离之外的特定物体(移动的行人和车)信息,以及红绿灯、限速要求信息,基于此信息进行避障规划(包括车车博弈,车人博弈等),基本可确保无人车在开放道路上的安全问题,不会发生任何形式的主动碰撞以及交通违章等。这部分内容的通讯时延要求ms级,迫切需要5G的支持。
车辆的传感器和摄像头相当于人类的眼睛,自动驾驶系统的逻辑推理和决策相当于人类的大脑,自动驾驶系统的运动控制操作相当于人类的手和脚,这些信息实时互通需要超高速传输和超高的可靠性、超低的时延。相对4G网络,5G传输速率提升100倍,峰值传输速率达到10Gbit/s,端到端时延达到ms级。在实际应用中,当车辆行驶在路上遇到突发情况,反应速度至关重要,只有5G这样的超高速率和超低时延才能满足无人驾驶的要求。
2.3 发展现状
在2019年世界新能源汽车大会,华为公司推出的5G + C-V2X车载通信技术获得了高度认可,且基于此研发了全球首款5G车载通信模组MH5000,采用自研的Balong 5000芯片,单芯多模,支持SA/NSA双组网,最高下行峰值速率为2Gbps,最高上行峰值速率为230Mbps,支持第三方应用开发,是业界首款集成5G + V2X技术的模组。
世界各国都很重视相关技术的发展,我国鼓励包括C-V2X在内的车联网技术的发展。多部委及地方政府,都针对性给出了明确的政策支持。据不完全统计,目前全国已经拥有超过30个测试示范区,其中包括上海、北京-河北、重庆、无锡(先导区)、杭州-桐乡、浙江、武汉、长春、广州、长沙、西安、成都、泰兴、襄阳等16个国家级示范区。这些示范区涵盖了无人驾驶和V2X测试场景建设、LTE-V2X/5G车联网应用、智慧交通技术应用等功能,提供了涉及安全、效率、信息服务、新能源汽车应用以及通信能力等的测试内容。
3 结束语
自动驾驶前景广阔,是未来汽车行业的发展趋势,相关技术飞速发展,相信随着5G技术的全面应用,自动驾驶会取得更大发展。
但我们仍需意识到, 自动驾驶最终目标的实现,并真正落地商用,是一个漫长的过程。除了技术和资金之外,还涉及到法律和伦理的问题。更重要的是,它是否能最终获得用户的信任和认可,被用户接受。目前认为自动驾驶将分为若干个过程,逐步实现:
- 第一个阶段:辅助驾驶安全和提高交通效率。
- 第二个阶段:在封闭园区的(商用车)的自动驾驶。
- 第三个阶段:在开放道路的(乘用车)的自动驾驶。
参考文献:
[1] Liu Chuan, Chen Jinying, Zhu Zhengmo, et al. Impact analysis of 5G on Driverless Cars [J]. Communications and Information Technology, 2017(3):43-44.
[2] Chen Xiaobo. Challenges and Prospects for the Development of Autonomous Vehicles [J]. Integrated Transport, 2016 (11) : 9-13.
[3] Yu Adong, Chen Ruiwei. Research on Auto Autonomous Driving Technology [J]. Practical Automotive Technology, 2017 (2) : 124-125.
[4] min-hui zhu. Gradually achieve automated driving five levels [J]. Journal of automobile and accessories, 2016 (11) : 4.
[5] Gao Hongbo, ZHANG Xinyu, ZHANG Tianlei, et al. Research on Variable Particle Size Measurement of Intelligent Driving Vehicles based on Cloud Model [J]. Journal of electronics, 2016,44 (2) : 365-373.
[6] Guo Xu. Analysis and Prospect of Driverless Technology from the perspective of artificial Intelligence [J]. Electronic World, 2017 (20) : 64-65.
[7] Wang Kejun, Zhao Yandong, Xing Xianglei. Research Progress on the Application of Deep learning in the field of driverless cars [J]. Journal of Intelligent Systems, 2012, 13 (1) : 55-69.
[8] 2018 Self-Driving Safety Report [R]. General Motors Cooperation, February 2018.
[9] W. Lu, Y. Zhou, G. Wan, S. Hou and S. Song, "L3-Net: Towards Learning Based LiDAR Localization for Autonomous Driving," 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 2019, pp. 6382-6391, doi: 10.1109/CVPR.2019.00655.
[10] Seif H G, Hu Xiaolong. Key Challenges of autonomous Vehicle Industry in Smart Cities: HIGH Definition Map [J]. Engineering, 2016 (02) :27-35.
[11] Xue Jianru, Li Gengxin. Scene Understanding and Autonomous Movement of driverless cars [J]. Unmanned Systems Technology, 2012,1 (2) :24-33.
[12] Lillicrap T P, Hunt J J, Pritzel A, et al. Continuous control with deep reinforcement learning [J]. Computer Science, 2015,8 (6) :A187.
[13] Scott P ,Hans A ,Xinxin D ,et al. Perception,planning,control,and coordination for autonomous vehicles[J]. Machines,2017,5(1).
本文分享自华为云社区《5G与自动驾驶那点事》,原文作者:Tianyi_Li。