参考资料:
https://www.icourse163.org/course/ISCAS-1002580008?tid=1003713012 //中国大学MOOC
https://www.bilibili.com/video/av23401751 //B站
《ROS操作系统入门讲义》PDF下载
链接:https://pan.baidu.com/s/1OCja2WLDRnjYXMrpnZ3-sQ
提取码:mziy
第一章、ROS简介
1. ROS:适用于机器人编程的框架,连接操作系统和ROS应用程序的中间件,是运行在Linux上的运行时环境
2. ROS特点
- 分布式点对点:机器人进程可以分别运行,便于模块化的修改和定制
- 多种语言支持:采用语言中立的接口定义,通信格式与编程语言无关
- 开源社区:ROS WIKI (http://wiki.ros.org/)
3. ROS优缺点

4. ROS安装
(1)版本选择:Ubuntu 16.04 + Kinetic //利用 cat /etc/issue 确定系统版本
(2)具体安装步骤参考:http://wiki.ros.org/cn //ROS WiKi 中文页面
- 配置Ubuntu初始环境:Ubuntu的设置 -> 软件与更新 -> Ubuntu软件 ->勾选关键字 universe , restricted , multiverse 三项
- 添加Ubuntu系统源:sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list' //中科大源
- 添加keys:sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
- 系统更新:sudo apt-get update && sudo apt-get upgrade //确保Debian软件包和索引是最新的
- 安装ROS:sudo apt-get install ros-kinetic-desktop-full //Ubuntu16.04安装Kinetic桌面完整版
注:单独安装软件包 sudo apt-get install ros-kinetic-包名;查找软件包 apt-cache search ros-kinetic
(3)配置ROS
- 初始化rosdep:sudo rosdep init && rosdep update
注:rosdep可以在编译某些源码的时候安装一些系统依赖,同时也是某些ROS核心功能组件所必需的工具
- ROS环境配置:echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
- 安装rosinstall:sudo apt-get install python-rosinstall
5. 测试ROS
(1)终端1:roscore //启动ROS
(2)终端2:rosrun turtlesim turtlesim_node //打开终端小海龟
(3)终端3:rosrun turtlesim turtle_teleop_key //利用键盘的方向键控制海龟移动
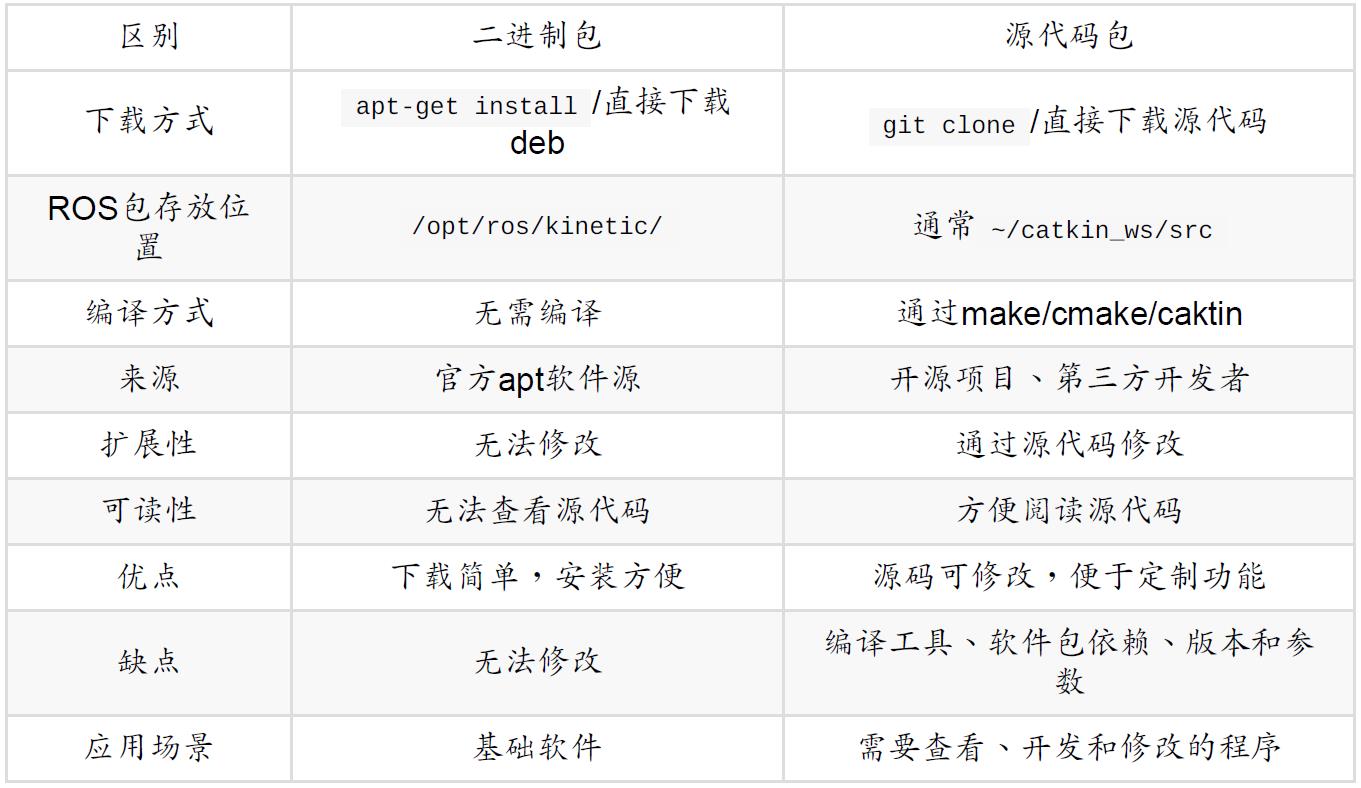
6. Ubuntu软件安装方式
(1)二进制包:sudo apt-get install git
二进制包里面包括了已经编译完成,可以直接运行的程序。你通过 sudo apt-get install 来进行下载和解包(安装),执行完该指令后就可以马上使用了。因此这种方式简单快捷,适合比较固定、无需改动的程序。
(2)源代码包:源代码下载 -> 编译 -> 运行
源代码包里是程序的原始代码,在计算机上必须经过编译,生成可执行的二进制文件,方可运行。一些个人开发的程序、第三方修改或者你希望修改的程序都应当通过源代码包的来编译安装。
示例:
下载源码包、安装依赖
1 $ cd 2 $ mkdir -p tutorial_ws/src #创建catkin工作空间 3 $ cd tutorial_ws/src #进入src路径,克隆教学软件包 4 $ git clone https://github.com/DroidAITech/ROS-Academy-for-Beginners.git 5 $ cd ~/tutorial_ws 6 $ rosdep install --from-paths src --ignore-src --rosdistro=kinetic -y //安装依赖
编译(需要回到工作空间 tutorial_ws)
1 $ cd ~/tutorial_ws 2 $ catkin_make 3 $ source ~/tutorial_ws/devel/setup.bash #刷新环境 方法一 4 $ rospack profile #刷新环境 方法二
注:
- 编译完成后,需要利用source命令刷新工作空间的环境 source ~/tutorial_ws/devel/setup.bash
- 可以利用 echo "source ~/tutorial_ws/devel/setup.bash" >> ~/.bashrc 保证每次打开终端,系统就会自动配置ROS环境变量
- 可以输入 source ~/.bashrc 使配置在当前窗口中立即生效
 7. ROS IDE开发工具推荐:RoboWare Studio // 官方地址:http://cn.roboware.me/#/Download
7. ROS IDE开发工具推荐:RoboWare Studio // 官方地址:http://cn.roboware.me/#/Download
优点:可以自动更新CMakeLists.txt、package.xml等配置文件
软件包和使用说明下载地址:
链接:https://pan.baidu.com/s/1UiTpCnXP6Kyau1YeTOkY8Q
提取码:phun