准备
- 1、终端起roslaunch cartographer_ros bslidar.launch
- 2、clion里面:Run ==> Attach to Process,在下拉框中选择cartographer_node来执行,可以debug
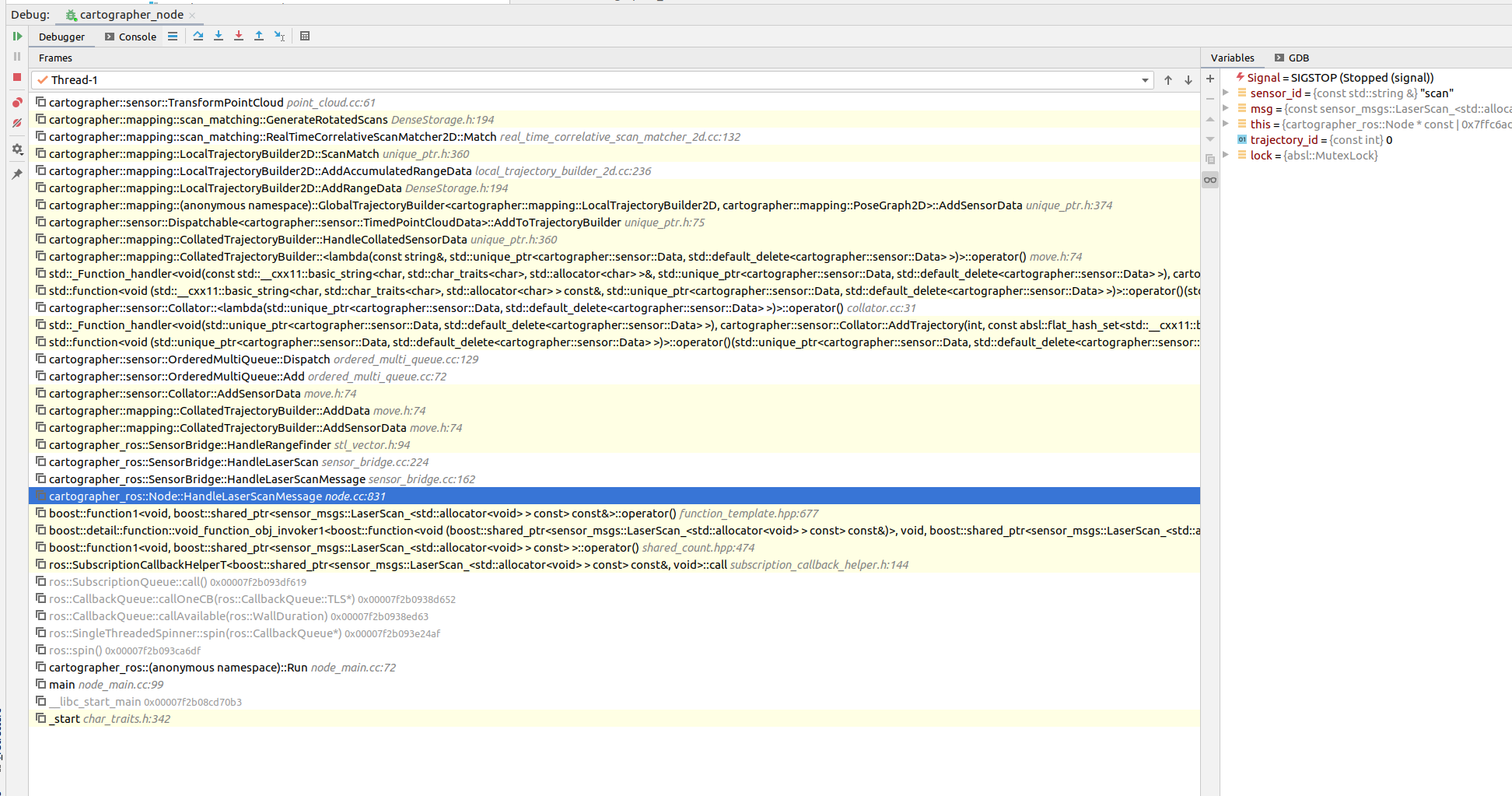
debug栏中可以看到线程信息,从下到上是执行调用到的函数,从这里就可以很清晰的看到数据流。可以根据这些信息来一步步看代码。
切换node debug的状态:左侧绿色竖线箭头Resume Program和停止按钮Pause Program来切换debug的状态。
这里说明下主要函数调用关系:
- 1、定义Node对象,定义了订阅的各传感器数据的回调函数及发布话题节点
Node::Node() - 2、根据FLAGS_start_trajectory_with_default_topics,用默认话题开始构建轨迹
Node::StartTrajectoryWithDefaultTopic() - 3、调用
Node::AddTrajectory() - 4、用map_builder_bridge来创建轨迹id,调用
MapBuilderBridge::AddTrajectory(),,接着启动订阅函数Node::LaunchSubscribers(),这样数据就开始进入回调函数,且数据都在当前轨迹下
把所有的对象初始化好后,数据进入回调函数后
-
5、通过
SensorBridge::HandleLaserScanHandleLaserScan()函数,为每一个激光点打上时间戳 -
6、随后在
SensorBridge::HandleRangefinder(),将激光数据点坐标系转换到tracking frame下,并将激光点云carto::sensor::TimedPointCloudData加入到轨迹构建器接口(trajectory_builder_->AddSensorData)中,进而调用子类接口CollatedTrajectoryBuilder::AddData(),然后进一步调用到Sensor下的Collator::AddSensorData()。
这里的数据关系层层递进,实质上是将ROS数据经过Bridge接口,将数据加入到轨迹构建器trajectory_builder_中,因为轨迹构建器中包含了sensor构建器,所以最终由sensor构建器处理数据的收集及分发。
- 7、数据到sensor收集器中后,调用
OrderedMultiQueue::Add(),存入数据并OrderedMultiQueue::Dispatch()分发数据,分发数据用的是Queue类中定义的Callback callback;回调函数。想了解这个回调函数是如何定义的,查看OrderedMultiQueue类。(C++知识加强下:std::function)
using Callback = std::function<void(std::unique_ptr<Data>)>;
- 8、分发数据是怎么回到轨迹构建器中的呢?这里就用到了lambda表达式。在初始化
CollatedTrajectoryBuilder的类对象时调用了sensor_collator_的AddTrajectory函数
sensor_collator_->AddTrajectory(
trajectory_id, expected_sensor_id_strings,
[this](const std::string& sensor_id, std::unique_ptr<sensor::Data> data) {
HandleCollatedSensorData(sensor_id, std::move(data));
});
在AddTrajectory中用了lambda表达式(C++知识加强下),来执行回调,意思就是,在程序最开始时就初始化了回调函数,当传感器数据收到后,就执行加入到轨迹的操作。
-
9、lambda函数体中,调用了
CollatedTrajectoryBuilder::HandleCollatedSensorData()函数,进而调用数据接口类data的data->AddToTrajectoryBuilder(wrapped_trajectory_builder_.get())函数,这样就把获取到的数据加入到轨迹中。 -
10、Dispatchable类继承自data,实现了AddToTrajectoryBuilder的函数,trajectory_builder接口对象调用
AddSensorData()
void AddToTrajectoryBuilder(
mapping::TrajectoryBuilderInterface *const trajectory_builder) override {
trajectory_builder->AddSensorData(sensor_id_, data_);
}
-
11、
mapping::TrajectoryBuilderInterface类是模板类,GlobalTrajectoryBuilder类和接口类是什么关系?调用该子类的AddSensorData函数 -
12、随后调用local_trajectory_builder_类对象的AddRangeData,数据就送到了局部轨迹构建器中,随后就是算法的核心部分。依次执行
LocalTrajectoryBuilder2D::AddRangeData、LocalTrajectoryBuilder2D::AddAccumulatedRangeData、
LocalTrajectoryBuilder2D::ScanMatch等函数
至此,整个数据流通了,接下来开始看激光数据的预处理细节,IMU和ODOM数据的处理细节,随后是算法核心部分,前端匹配和后端位姿优化。
这里本文没有对每一个步骤梳理的很细节,也不连贯,完全是按照debug数据流来梳理,关于各种类对象的创建,继承关系是怎么样的暂时不做详细说明。有可能存在错误,后面细看代码后再整理更新。