概述
特征检测与匹配的目标是识别一个图像中的关键点与另一个图像中的对应点之间的配对。在此实验中,你将编写代码以检测图像中的特征点(对于平移、旋转和照明具有一定的不变性),并在另一个图像中找到最佳匹配特征。
实施细节
特征检测
参考资料
sobell算子水平和垂直方向导数问题——chaibubble
3×3sobel算子

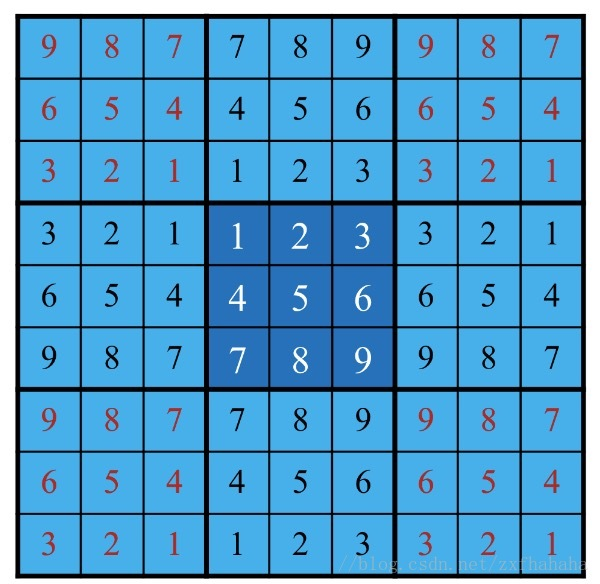
reflection模式(镜像)
可以使用以下库函数:
scipy.ndimage.sobel:使用 Sobel 算子对输入图像滤波。
scipy.ndimage.gaussian_filter:使用高斯卷积核对输入图像滤波。
np.arctan2
scipy.ndimage.filters.maximum_filter:使用最大过滤器过滤输入图像。
scipy.ndimage.filters.convolve:使用选定的滤波器对输入图像滤波。
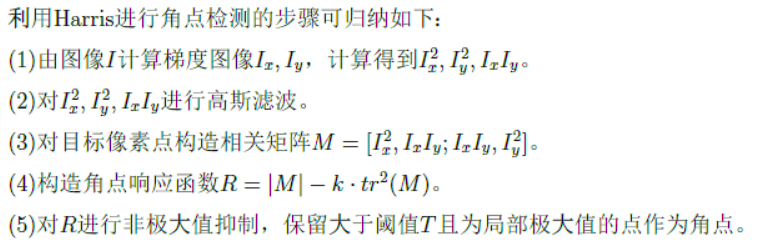
补充完成类 HarrisKeypointDetector 中的三个函数:
computeHarrisValues (TODO 1,为图像中每个像素计算 Harris 强度函数与方向)
computeLocalMaxima (TODO 2,计算布尔矩阵,指示每个像素是否是局部最大值)
detectKeypoints (TODO 3,根据像素的 Harris 强度与是否局部最大值生成特征点集合)。