在计算convex和Triangle Mesh的碰撞中由于最终碰撞的级别会被分解为convex-triangle之间的碰撞检测,因此如果一个convex同时和Triangle Mesh中的多个Triangle发生接触的时候会导致一些 接触点是不正确的(对于单个Convex-triangle是正确的对于convex-mesh却是不正确的)如图:
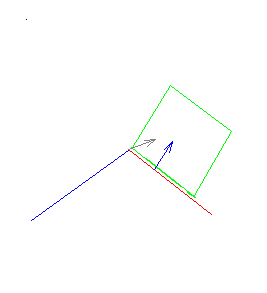
为了方便我画了2d的模式,蓝色和红色各代表一个三角形,绿色是一个凸多面体,在这一时刻绿色和红色会计算出那个蓝色箭头的法向量,而绿色和蓝色三角行会计算出灰色的法向量,红色的那个最近点对是在红色三角形的面上而,蓝色的是在蓝色三角形的一条边界上而这条边界是和红色共享的(图中表示的就是红蓝的交点),这样的边称为inner edge,在上图情况下这个在inner edge上的接触点应该被消除。
在看一张图:

同样这次接触点也存在inner edge 上但是这一次是正确的接触点应该被保留!,那么为什么会出现第一张图这样错误的接触点呢,关键在于convex在和蓝色三角形进行碰撞测试的时候并不知道红色三角形的存在,也就是说该最近点对只是对于蓝色三角形单独而言的,如果将红色三角形考虑在内,那么由于这条inner edge也包含于红色三角形,因此如果红色三角形的最近点并不在这个edge上,那么对于整体而言这个edge上的点均不是最近点,因此都应该被排除。
因此最终算法如下,首先定义一个avoid集合代表那些feature(顶点,边)应该会被排除,收集完所有接触点之后,分2个pass进行,第一遍扫描每一个三角形上的接触点,对于三角形的任一个顶点,如果没有出现在该三角形的最近点对中那么加入avoid集合,对于任意一条边如果没有出现在该三角形的最近点对中那么加入avoid集合,对于面而言永远不需要加入avoid集合(这是由凸面体的性质决定的),
第2个pass重新扫描所有接触点如果它不再avoid集合中那么作为正常接触点输出,否则抛弃。
使用这种方法 在我的测试中暂时还没有出现过任何由于inner edge导致的法向错误:如图
