转自:https://blog.kido.site/2018/11/24/db-and-cache-preface/
方案一
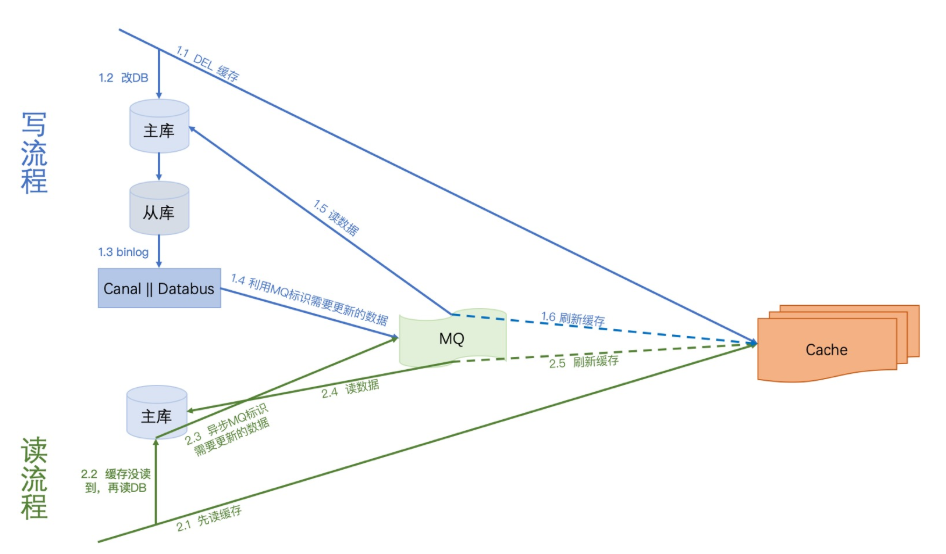
写流程:先删除缓存,删除之后再更新DB,再异步将数据刷回缓存。如果先更新数据库再更新缓存,更新数据库时,程序访问缓存时还是旧的数据。
读流程:先读缓存,如果缓存没读到,则去读DB,之后再异步将数据刷回缓存。
缺点:
容灾不足
第一步DEL缓存失败’,如果继续执行,那么从’更新完DB’到异步’刷新缓存’缓存期间,数据处于滞后状态。而且如果缓存处于不可写状态,那么异步刷新那步也可能会失败,那缓存就会长期处于旧数据。
并发问题
写写并发:如果同时有多个服务器的多个线程进行’步骤1.2更新DB’,更新DB完成之后,它们就要进行异步刷缓存,多服务器的异步操作是无法保证顺序的,所以后面的刷新操作存在相互覆盖的并发问题,也就是说,存在先更新的DB操作,反而很晚才去刷新缓存,那这个时候,数据也是错的
读写并发:服务器A在进行’读操作’,在A服务器刚完成2.2时,服务器B在进行’写操作’,假设B服务器1.3完成之后,服务器A的1.3才被执行,这个时候就相当于更新前的老数据写入缓存,最终数据还是错的。
方案二
方案一 一个比较大的缺陷在于刷新缓存有可能会失败,而失败之后缓存中数据就一直会处于错误状态,所以它并不能保证数据的最终一致性”为了保证“数据最终一致性”,我们引入binlog,通过解析binlog来刷新缓存,这样即使刷新失败,依然可以进行日志回放,再次刷新缓存。
写流程:
第一步先删除缓存,删除之后再更新DB,我们监听从库(资源少的话主库也ok)的binlog,通过分析binlog我们解析出需要需要刷新的数据,然后读主库把最新的数据写入缓存。
这里需要提一下:最后刷新前的读主库或者读从库,甚至不读库直接通过binlog解析出需要的数据都是ok的,这由业务决定,比如刷新的数据只是表的一行,那直接通过binlog就完全能解析出来;然而如果需要刷新的数据来自多行,多张表,甚至多个库的话,那就需要读主库或是从库才行
读流程:
第一步先读缓存,如果缓存没读到,则去读DB,之后再异步将数据刷回缓存

优点:
容灾 写步骤1.4或1.5 如果失败,可以进行日志回放,再次重试。无论步骤1.1是否删除成功,后续的刷新操作是有保证的。
缺点:
只适合简单业务(每次需要刷新的数据,都来自单表单行),复杂业务容易发生并发问题。
为什么复杂业务就不行呢?我举个例子
我们假设 一个订单 = A表信息 + B表信息
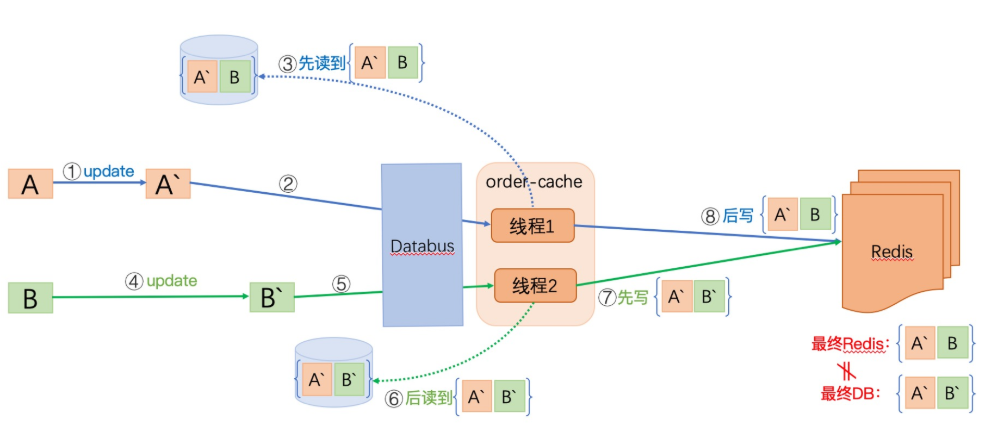
由于A表先变化,经过1,2,3步后,线程1获取了A’B (A表是新数据,B表的老数据),当线程1还没来得及刷新缓存时,并发发生了:
此时,B表发生了更新,经过4,5,6,7将最新的数据A’B’写入缓存,此时此刻缓存数据是符合要求的。
但是,后来线程1进行了第8步,将A’B写入数据,使得缓存最终结果 与 DB 不一致。
缺点1的改进
- 针对单库多表单次更新的改进:利用事务
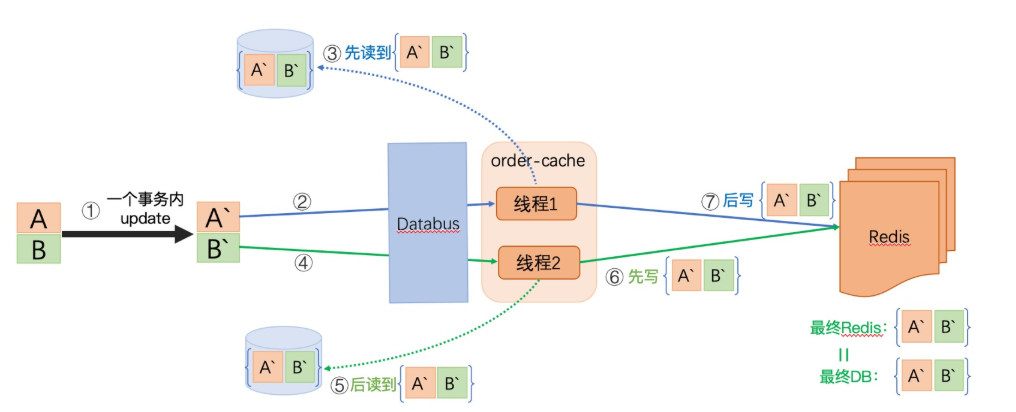
当AB表的更新发生在一个事务内时,不管线程1、线程2如何读取,他们都能获取两张表的最新数据,所以刷新缓存的数据都是符合要求的。
但是这种方案具有局限性:那就是只对单次更新有效,或者说更新频率低的情况下才适应,比如我们并发的单独更新C表,并发问题依然会发生。
所以这种方案只针对多表单次更新的情况。
- 针对多表多次更新的改进:增量更新

每张表的更新,在同步缓存时,只获取该表的字段覆盖缓存。
这样,线程1,线程2总能获取对应表最新的字段,而且Databus对于同表同行会以串行的形式通知下游,所以能保证缓存的最终一致性。
这里有一点需要提一下:更新“某张表多行记录“时,这个操作要在一个事务内,不然并发问题依然存在,正如前面分析的
依然是并发问题
即使对于缺点1我们提出了改进方案,虽然它解决了部分问题,但在极端场景下依然存在并发问题。
这个场景,就是缓存中没有数据的情况:
- 读的时候,缓存中的数据已失效,此时又发生了更新
- 数据更新的时候,缓存中的数据已失效,此时又发生了更新
这个时候,我们在上面提到的“增量更新”就不起作用了,我们需要读取所有的表来拼凑出初始数据,那这个时候又涉及到读所有表的操作了,那我们在缺点1中提到的并发问题会再次发生
适合使用的场景:业务简单,读写QPS比较低的情况。
这个方案优缺点都比较明显,binlog用来刷新缓存是一个很棒的选择,它天然的顺序性用来做同步操作很具有优势;其实它的并发问题来自于Canal 或 Databus。拿Databus来说,由于不同行、表、库的binlog的消费并不是时间串行的,那怎么解决这个问题呢。
方案三
问题就来自于“读数据库” + “写缓存” 之间的交错并发,那怎么来避免呢?
有一个方法就是:串行化,我们利用MQ将所有“读数据库” + “写缓存”的步骤串行化
写流程:
第一步先删除缓存,删除之后再更新DB,我们监听从库(资源少的话主库也ok)的binlog,通过分析binlog我们解析出需要需要刷新的数据标识,然后将数据标识写入MQ,接下来就消费MQ,解析MQ消息来读库获取相应的数据刷新缓存。
关于MQ串行化,大家可以去了解一下 Kafka partition 机制 ,这里就不详述了
读流程:
第一步先读缓存,如果缓存没读到,则去读DB,之后再异步将数据标识写入MQ(这里MQ与写流程的MQ是同一个),接下来就消费MQ,解析MQ消息来读库获取相应的数据刷新缓存。
优点
容灾完善
写流程容灾分析
- 写1.1 DEL缓存失败:没关系,后面会覆盖
- 写1.4 写MQ失败:没关系,Databus或Canal都会重试
- 消费MQ的:1.5 || 1.6 失败:没关系,重新消费即可
读流程容灾分析
- 读2.3 异步写MQ失败:没关系,缓存为空,是OK的,下次还读库就好了
无并发问题
这个方案让“读库 + 刷缓存”的操作串行化,这就不存在老数据覆盖新数据的并发问题了。
方案四
在前一个方案的基础上实现“强一致性”
强一致性,包含两种含义:
- 缓存和DB数据一致
- 缓存中没有数据(或者说:不会去读缓存中的老版本数据)
首先我们来分析一下,既然已经实现了“最终一致性”,那它和“强一致性”的区别是什么呢?没错,就是“时间差”,所以:
“最终一致性方案” + “时间差” = “强一致性方案”
那我们的工作呢,就是加上时间差,实现方式:我们加一个缓存,将近期被修改的数据进行标记锁定。读的时候,标记锁定的数据强行走DB,没锁定的数据,先走缓存

写流程:
我们把修改的数据通过Cache_0标记“正在被修改”,如果标记成功,则继续往下走,后面的步骤与上一篇是一致的《缓存与数据库一致性系列-03》;那如果标记失败,则要放弃这次修改。
何为标记锁定呢?比如你可以设定一个有效期为10S的key,Key存在即为锁定。一般来说10S对于后面的同步操作来说基本是够了~
如果说,还想更严谨一点,怕DB主从延迟太久、MQ延迟太久,或Databus监听的从库挂机之类的情况,我们可以考虑增加一个监控定时任务。
比如我们增加一个时间间隔2S的worker的去对比以下两个数据:
- 时间1: 最后修改数据库的时间
VS - 时间2: 最后由更新引起的’MQ刷新缓存对应数据的实际更新数据库’的时间
数据1: 可由步骤1.1获得,并存储
数据2: 需要由binlog中解析获得,需要透传到MQ,这样后面就能存储了
这里提一下:如果多库的情况的话,存储这两个key需要与库一一对应
如果 时间1 VS 时间2 相差超过5S,那我们就自动把相应的缓存分片读降级。
读流程:
先读Cache_0,看看要读的数据是否被标记,如果被标记,则直接读主库;如果没有被标记,后面的步骤与上一篇是一致的(《缓存与数据库一致性系列-03》)。
方案分析
优点剖析
1. 容灾完善
我们一步一步来分析:
写流程容灾分析
- 写1.1 标记失败:没关系,放弃整个更新操作
- 写1.3 DEL缓存失败:没关系,后面会覆盖
- 写1.5 写MQ失败:没关系,Databus或Canal都会重试
- 消费MQ的:1.6 || 1.7 失败:没关系,重新消费即可
读流程容灾分析
- 读2.1 读Cache_0失败:没关系,直接读主库
- 读2.3 异步写MQ失败:没关系,缓存为空,是OK的,下次还读库就好了
2. 无并发问题
这个方案让“读库 + 刷缓存”的操作串行化,这就不存在老数据覆盖新数据的并发问题了
缺点剖析
1. 增加Cache_0强依赖
这个其实有点没办法,你要强一致性,必然要牺牲一些的。
但是呢,你这个可以吧Cache_0设计成多机器多分片,这样的话,即使部分分片挂了,也只有小部分流量透过Cache直接打到DB上,这是完全是可接受的
2. 复杂度是比较高的
涉及到Databus、MQ、定时任务等等组件,实现起来复杂度还是有的