课程的网址:https://www.coursera.org/learn/robotics-motion-planning/home/welcome?utm_medium=email&utm_source=other&utm_campaign=opencourse.welcome.robotics-motion-planning.%7Eopencourse.welcome.r8zaNVu-EeW0ugrg2GGh4Q.
对于课程后面留的程序作业中Dijkstra.m的分析。
路径搜索问题:
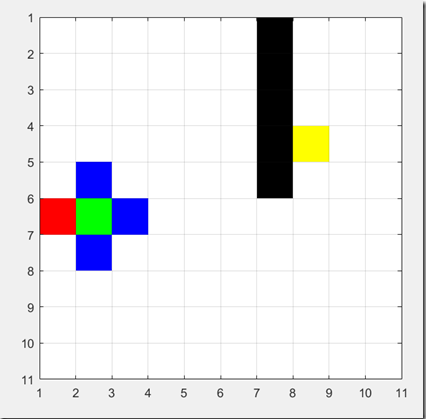
路径搜索问题,就类似于下图中,机器人要从绿色起点走到黄色终点,沿什么样路线过去?
这是我们从视觉上来理解这个问题,可以沿着红线走过去。先不说怎么让机器人自己能能找到这条线,先来说怎么把诸如“地图”、"线路"、"位置"、“障碍物”等等概念表示成代码呢?
地图
说算法之前,看看这个地图怎么表示。
首先,把地图划分为网格,这样就可以跟矩阵对应起来了。矩阵的行、列就直观的表示地图上的每一个位置坐标。
下面的 ones 命令就生成了一个 10*10 的全 1 阵 map,表示一张 10*10 的地图。那数字 1 表示什么呢?目前为止,什么也不表示,没有任何意义。
rows = 10; ncols = 10; map = ones(rows, ncols);
地图的其它信息,比如起点,终点,障碍物等等,怎么在这个地图上表示出来呢?那就给 map 矩阵赋不同的值呗,比如我们约定好:空地用 1 表示,墙用 2 表示。
我们约定好以后,矩阵的值就变得有意义了。将来判断 map(2,2)~=2,我们就知道 (2,2)这个位置是不是有墙。( 考虑到浮点数判断的精度问题,将来地图的数据类型可以设置为整型,之类。)
map (1:5, 7) = 2; % 设置一堵墙 map(6, 2) = 5; % 设置起点 map(4, 8) = 6; % 设置终点
但 map 其实还只是一堆数字,不直观。所以我们希望能把这个 map 给“画”出来。比如,我希望空地的1对应画白色;而墙的2对应画黑色:
% R G B cmap = [1 1 1; ...% 1 - white - clear cell 0 0 0; ...% 2 - black - obstacle 1 00; ...% 3 - red = visited 0 0 1; ...% 4 - blue - on list 0 1 0; ...% 5 - green - start 1 1 0];% 6 - yellow – destination
colormap(cmap);
这样设置之后,map 矩阵由于是 double 类型的,所以它的值为1-6时,画什么颜色就按照这里配置的颜色映射来定。画地图:
image(1.5,1.5,map); % image 命令画图时,对于超出上下限的值,依旧按照上下限对应的颜色来画。 grid on; axis image;
这样,这张地图就画出来了:

最后我们的目的是,要找到这么条黄色的路线:
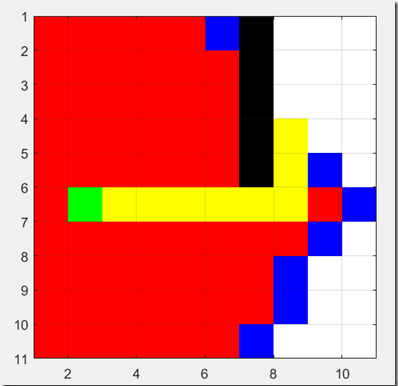
可以看到图中还有其他颜色,这是为了表示算法的搜索过程,特意修改了地图的值来做显示用。
比如红色,就是我搜索过的区域,蓝色,就是下一步的搜索候选区。
算法的过程叙述:
1. 从第一个搜索中心:绿点开始,找到上下左右邻居,其实就是起点行列坐标i-1,j之类
2. 把找到的邻居变成蓝色(加入下次的搜索备选中心),计算它们到起点的路程(其实就是+1),保存到路程矩阵里;
1’选新的搜索中心(从蓝色邻居里挑 “距离起点路程最近的那个”),找到上下左右邻居
2’把它的新邻居也变成蓝色,计算新邻居到起点的路程(在当前搜索中心路程1的基础上,再+1),保存到路程矩阵里;
1”再从所有蓝色邻居里挑选搜索中心,找到新邻居
2”把新邻居变成蓝色,计算邻居到起点的路程,保存到路程矩阵
一直这么循环,总有一天,会一直搜索到终点。
PS:用不同的方法从蓝色邻居里来挑选搜索中心,就构成了 Dijkstra 算法和 A* 算法的主要区别。
Dijkstra 里只有一个原则,就是挑选离起点路程最近的,其实就是无方向向外扩散的。而 A*算法还会加上一个跟终点的距离考量,所以就是带有方向性的扩散。一般情况下,A* 会搜索的快一点。
可以看到,这个算法要保存一些信息,所以先定义一些变量。
start_node = sub2ind(size(map), 6, 2); % 为了方便,把起点和终点的行列下标换成索引,所以 map(6,2)和 map(start_node)就是同一个意思。 dest_node = sub2ind(size(map), 4, 8);
a. 定义一个变量来保存蓝色邻居以及它们到起始格的路程
所以这里定义了 distanceFromStart 来保存这些信息,初始化为 Inf,表示从没有访问过。一旦有值,就说明是蓝色邻居,赋值的大小就表示改点跟起始点的路程。一旦变成红色,就把它的值再改回 Inf。
至于具体要显示动态图,要修改的是 map 的值。
最后,这个矩阵会更新成这个样子。路程更新到了第4行第8列的终点位置,而且它距离起点有8步。那么这八步是怎么走的呢,就需要有矩阵来保存路线信息。

b. 定义一个变量来保存路径。
parent = zeros(nrows,ncols);
这个矩阵最后会更新成什么样,它怎么表示路线呢?
比如下图,第4行第8列的值是75,就表示它的上家的格子编号是75,其实也就是矩阵的索引位置,按列数过来就是第8列第5行。这里的值是76,就表示它的上家的格子第8列第6行。依次类推,这样就可以反推出一条线路来了。

变量定义完了,那么开始循环搜索路径
while true
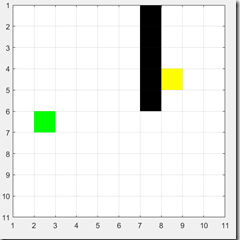
先画一下当前的地图
map(start_node) = 5; map(dest_node) = 6; image(1.5, 1.5, map); grid on; axis image; drawnow;
这时就出来了这张图
那么,就开始搜索了,可是以哪个点为搜索中心呢。
当然是从蓝色邻居列表选离初始点最近的那一个点。
因为 distanceFromStart 的初始值是 Inf,已知的只有起始点的路程,为0。所以如果是第一次循环,那min函数得到的current自然就是16了,这也是初始点的索引坐标;这时得到的 min_dist =0。
[min_dist, current] = min(distanceFromStart(:)); %搜索中心的索引坐标:current, %搜索中心与起始点的路程:min_dist % 这两个值后面会用。 %这里做一些简单判断,如果已经扩张到终点了,或者没有路径,则退出循环。 if ((current == dest_node) || isinf(min_dist)) break; end;
为了画图效果,把 map 的前点坐标赋值为 3 ,表示本次循环已经以此为中心搜索一次了。
map(current) = 3;
可以看到这是现在 map 的值,如果画出来就是这样:

同时把distanceFromStart的这个位置赋值为 Inf,表示它已经当过搜索中心了。
上面的 min 函数将来就不可能再找到这个坐标。
distanceFromStart(current) = Inf;
把搜索中心的邻居的坐标点找出来,这里只找上下左右的邻居没有计算斜角:
所以(6,2)的四个邻居的坐标计算出来,得到一个四行两列的结果:
neighbor =
5 2
7 2
6 3
6 1
为了方便,现在把这种行列形式变为索引形式:
neighborIndex = sub2ind(size(map),neighbor(:,1),neighbor(:,2))
neighborIndex =
15
17
26
6
下面就要计算每个邻居的路程,保存每个邻居的路线。
for i=1:length(neighborIndex) if (map(neighborIndex(i))~=2) && (map(neighborIndex(i))~=3&& map(neighborIndex(i))~= 5) map(neighborIndex(i)) = 4; % 在地图上把邻居变成蓝色。这里纯为了显示用。 % distanceFromStart这个矩阵初始值是 Inf ,所以第一次找到它的时候肯定会更新路径的, % 循环多次以后,可能会有多次机会走到这个邻居,所以要看哪条路近。 % 只有邻居已有的路线比“从当前搜索中心走过去”要长的话,才会更新这个邻居的信息。 ifdistanceFromStart(neighborIndex(i))> min_dist + 1 distanceFromStart(neighborIndex(i)) = min_dist+1; %更新邻居的路程信息 parent(neighborIndex(i)) = current; % 更新邻居的路径信息 end end end
第一次搜索后,可以看到这四个邻居的距离值 distanceFromStart,更新为 1 了:

然后,这四个邻居的线路,16 就是表示是从起始点(坐标索引是16)走过来的。
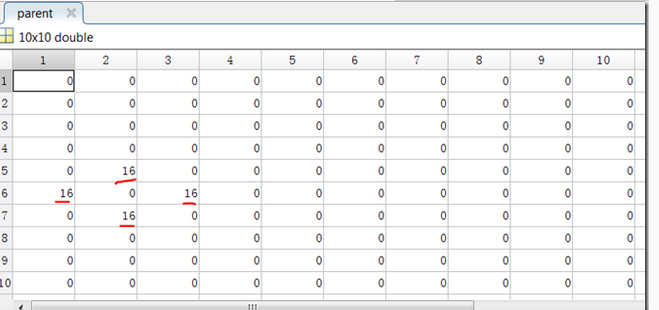
map 就变成这样:
end %这是 while true 对应的end
这是第一轮循环,然后再把上面的 while 循环再走一遍。
从之前的代码可以看到,会先把起始点的颜色重置一下。然后上一轮找到的四个邻居已经标记为蓝色了。

同样,第二次也会先定搜索中心,根据上一次循环得到的 distanceFromStart 矩阵的结果,其实最小值有四个,都是1,Dijkstra算法没有别的考量权重,所以这里只是按顺序,取了第一个 1 作为搜索中心:
[min_dist, current] = min(distanceFromStart(:)); if ((current == dest_node) ||isinf(min_dist)) break; end; map(current) = 3; %把新的搜索中心标记为红色 distanceFromStart(current) = Inf; %把搜索中心从邻居去除。 [i, j] = ind2sub(size(distanceFromStart), current);
得到的current就是左边这个红点,min_dist就是刚才计算出来的1。
所以,你看这时候,搜索中心在边界,左边那个(6,0)超出了边界,就是假邻居了:
neighbor = [i-1,j;... i+1,j;... i,j+1;... i,j-1]
neighbor =
5 1
7 1
6 2
6 0
需要把它给去掉:
outRangetest = (neighbor(:,1)<1) + (neighbor(:,1)>nrows) +... (neighbor(:,2)<1) + (neighbor(:,2)>ncols ) locate = find(outRangetest>0); neighbor(locate,:)=[] % =[]就是删除的意思。
neighbor =
5 1
7 1
6 2
同样,开始更新每一个邻居的信息:
neighborIndex = sub2ind(size(map),neighbor(:,1),neighbor(:,2)) fori=1:length(neighborIndex) if (map(neighborIndex(i))~=2) && (map(neighborIndex(i))~=3 && map(neighborIndex(i))~= 5) map(neighborIndex(i)) = 4; ifdistanceFromStart(neighborIndex(i))> min_dist + 1 distanceFromStart(neighborIndex(i)) = min_dist+1; parent(neighborIndex(i)) = current; end end end
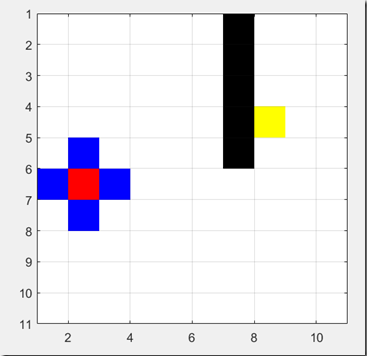
最后,map 更新,红点就是已经当过搜索中心了,蓝点就是全部的待搜索邻居。

下面的 distanceFromStart 就是所有蓝点的位置(有数值的地方),以及这些蓝点到起始点的路程(数值)。
下一个循环,便接着再找 distanceFromStart 的最小值所在的位置,作为搜索中心。
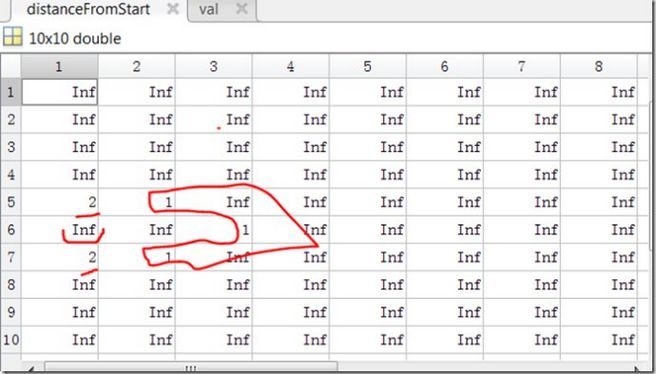
可以看到,有1,1就是从起始点1步就走到了这里;2表示从起始点两步就走到了这里。
那,是沿着哪条线路走过来的呢?
就得对照着看 parent 矩阵的数据了,上面那张图里的 2 步,就是下图的箭头这么走出来的:
6,16表示的是矩阵的索引编号。

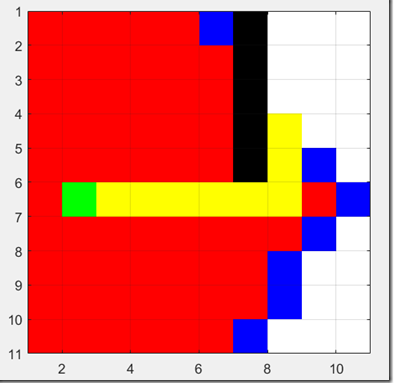
那么,一直这么循环下去,最后会得到什么呢,也就是这样图:

最后得到的这个 distancdFromStart 矩阵,可以看出,从起始点到目标点[4,8],需要走8步。

那怎么走呢?parent里表示出了路线,按照格子里所显示的索引坐标,倒回来追溯:

脚本主框架是从课程里拿出来的,算法实现部分我没考虑代码效率,只是为了大概理解算法:
%% % set up color map for display cmap = [1 1 1; ...% 1 - white - clear cell 0 0 0; ...%2 - black - obstacle 1 0 0; ...% 3 - red = visited 0 0 1; ...% 4 - blue - on list 0 10; ...% 5 - green - start 1 1 0];% 6 - yellow - destination colormap(cmap); map = zeros(10); % Add an obstacle map (1:5, 7) = 2; map(6, 2) = 5; % start_coords map(4, 8) =6; % dest_coords image(1.5,1.5,map); grid on; axis image; %% nrows = 10; ncols = 10; start_node = sub2ind(size(map), 6, 2); dest_node = sub2ind(size(map), 4, 8); % Initialize distance array distanceFromStart = Inf(nrows,ncols); distanceFromStart(start_node) = 0; % For each grid cell this array holds the index of its parent parent = zeros(nrows,ncols); % Main Loop while true % Draw current map map(start_node) = 5; map(dest_node) = 6; image(1.5, 1.5, map); grid on; axis image; drawnow; % Find the node with the minimum distance [min_dist, current] = min(distanceFromStart(:)); if ((current == dest_node) ||isinf(min_dist)) break; end; map(current) = 3; distanceFromStart(current) = Inf; [i, j] = ind2sub(size(distanceFromStart), current); neighbor = [i-1,j;... i+1,j;... i,j+1;... i,j-1] outRangetest = (neighbor(:,1)<1) + (neighbor(:,1)>nrows) +... (neighbor(:,2)<1) + (neighbor(:,2)>ncols ) locate = find(outRangetest>0); neighbor(locate,:)=[] neighborIndex = sub2ind(size(map),neighbor(:,1),neighbor(:,2)) fori=1:length(neighborIndex) if (map(neighborIndex(i))~=2) && (map(neighborIndex(i))~=3 && map(neighborIndex(i))~= 5) map(neighborIndex(i)) = 4; ifdistanceFromStart(neighborIndex(i))> min_dist + 1 distanceFromStart(neighborIndex(i)) = min_dist+1; parent(neighborIndex(i)) = current; end end end end
%% if (isinf(distanceFromStart(dest_node))) route = []; else %提取路线坐标 route =[dest_node]; while (parent(route(1)) ~= 0) route = [parent(route(1)), route]; end %动态显示出路线 for k = 2:length(route) - 1 map(route(k)) = 7; pause(0.1); image(1.5,1.5, map); grid on; axis image; end end