前言:
首先ROS大家应该比较熟悉了哈,如果需要补充一下请看我之前的这篇文章 《嵌入式的我们为什么要学ROS》,对于嵌入式来说ROS是一个很好的进阶方向,所以如何快速的安装一个ROS到我们电脑上是一件很重要的事情。当然ROS官网都有进行介绍如何安装,但是由于网络地址的原因,ROS安装如果按照官网的方法,你要踩很多的坑。所以我作为一个过来人,介绍一些我是如何快速安装的。
ROS 目前主要支持 Ubuntu、OSX、Android、Arch、Debian 等系统,ROS 也针对 ARM 处理器编译了核心库和部分功能包。新发布的 ROS2 也支持 Windows 系统。
选择一个适合你的 ROS 版本很重要,因为我使用的本次测试使用的 Ubuntu 版本为 Ubuntu 16.04,ROS Kinetic Kame 还是比较适合的。如果你使用的是 Ubuntu 20 更新的版本,可以安装 noetic 版本,虽然版本不一样,但是安装时的操作基本都是一样的。

开始安装:
首先我们看官网的教程
,虽然有官方的教程,但是我们知道ROS官方相关的源都在国内,所以如果你使用官网的教程,那么相信你如果不使用特殊方法的话,你会安装的很费力。大部分包括之前的我就被安装时候下载速度惊呆。
所以第一件事情,请大家更换ROS的国内镜像
sudo vi /etc/apt/sources.list

设置ROS的sources.list为国内镜像:
这里有其他人做的参考,但是经过使用之后发现有些问题:
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ main" > /etc/apt/sources.list.d/ros-latest.list'
有问题!!!

sudo apt-get update 会提示如下错误
E: Malformed entry 1 in list file /etc/apt/sources.list.d/ros-latest.list (Suite)
E: The list of sources could not be read.
我的建议使用官网的命令, 再把链接替换成,国内镜像源。
sudo sh -c 'echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
再使用官网命令添加 keys
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654

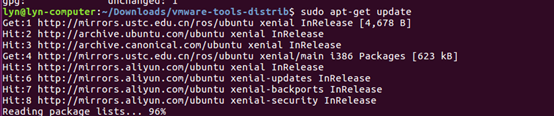
加载软件包列表
一旦配置完软件版本仓库(repositories)之后,可以用下列命令得到最新的可用软件包列表:
udo apt-get update
需要注意的是,这会更新你系统中所有的软件版本仓库,而不仅仅是新添加的 ROS 库。
安装 ROS 软件包
ROS系 统非常庞大,包含众多功能包、函数库和工具,所以ROS官方为用户提供了多种安装版本:
桌面完整版安装(Desktop-Full):这是最为推荐的一种安装版本,除了包含ROS的基础功能(核心功能包、构建工具和通信机制)外,还包含丰富的机器人通用函数库、功能包(2D/3D感知功能、机器人地图建模、自主导航等)以及工具(rviz可视化工具、gazebo仿真环境、rqt工具箱等)。命令为:
sudo apt-get install ros-kinetic-desktop-full
默认全装,后面大家也不需要再安装了。 分包安装的内容大家可以参看我篇头所写的那篇 ROS 文章。
如果按照官方源,那我们这里需要下载安装好长的时间,不过用国内镜像 不出意外 一般是十几分钟就可以下载完毕。
如果提示下载失败, 重复这个命令:
sudo apt-get install ros-kinetic-desktop-full

环境设定
每次启动新的shell时,如果将ROS环境变量自动添加到bash会话中,将很方便:
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
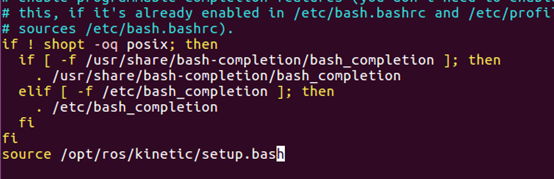
. ~/.bashrc
source ~/.bashrc
构建软件包的依赖关系
rosinstall 是一个常用的命令行工具,我们可以通过一个命令轻松下载 ROS 软件包的许多源代码树。
要安装此工具和其他依赖项以构建ROS软件包,请运行:
sudo apt install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential


为系统设置rosdep
rosdep 是 ROS 自带的工具,主要功能是为某些功能包安装依赖关系,同时某些ROS核心功能包必须用到的工具,这个初始化步骤是一次性的,一旦 ROS 正常工作,多数用户不再需要访问 rosdep。完成上述安装步骤之后,需要使用如下命令进行初始化操作:
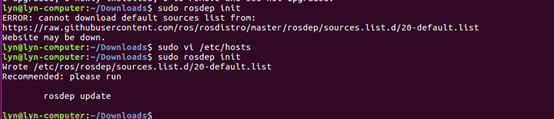
sudo rosdep init
rosdep update
rosdep update 会在你的账户中初始化 rosdep 系统,该命令在你的根目录下保存一些文件,文件夹名为 .ros,因为是初始化,这个命令只需要运行一次。该命令是在普通用户下运行。
rosdep init 经常出现问题,加载失败和下载失败
**error loading sources list
**

sudo vi /etc/hosts
在最下面添加一句这个:
151.101.84.133 raw.githubusercontent.com

看小乌龟
安装小乌龟,这个看似简单的小乌龟例程,其实蕴含ROS最基础的原理和机制。
sudo apt-get install ros-kinetic-turtlesim
打开一个终端(Terminal),这是ROS运行需要的管理器节点
roscore

打开第二个Terminal,启动turtlesim仿真器节点(可以把小乌龟的界面长置顶)
rosrun turtlesim turtlesim_node

打开第三个Terminal,通过使用键盘的前后左右按键进行控制小乌龟
rosrun turtlesim turtle_teleop_key

ROS安装完成