最小生成树:
普里姆算法 和 克鲁斯卡尔算法
普里姆算法:归并顶点,适用稠密网。
克鲁斯卡尔算法:归并边,适用稀疏网。
/******* 普里姆算法(最小生成树) *********/void MiniSpanTree_Prim(AMGraph G, VerTexType u)//最小生成树 普利姆 { int i, j, k; VerTexType u0, v0; k = LocateVex(G, u); for (j = 0; j < G.vexnum; ++j) if (j != k) closedge[j] = { u,G.arcs[k][j] }; closedge[k].lowcost = 0; for (i = 1; i < G.vexnum; ++i) { k = Min(G); u0 = closedge[k].adjvex; v0 = G.vexs[k]; cout << u0 <<"--"<< v0<<" "; closedge[k].lowcost = 0; for (j = 0; j < G.vexnum; j++) if (G.arcs[k][j] < closedge[j].lowcost) closedge[j] = { G.vexs[k],G.arcs[k][j] }; } }
/**************克鲁斯卡尔算法 (最小生成树)************/ void MiniSpanTree_Kruskal(AMGraph G) { int i, j, v1, v2, vs1, vs2; Sort(G); for (i = 0; i < G.vexnum; ++i) Vexset[i] = i; for (i = 0; i < G.arcnum; ++i) { v1 = LocateVex(G, Edge[i].Head); v2 = LocateVex(G, Edge[i].Tail); vs1 = Vexset[v1]; vs2 = Vexset[v2]; if (vs1 != vs2) { cout << Edge[i].Head << "--" << Edge[i].Tail <<" "; for (j = 0; j < G.vexnum; ++j) if (Vexset[j] == vs2) Vexset[j] = vs1; } } }
最短路径:
迪杰特斯拉算法和弗洛伊德算法
/**************迪杰特斯拉算法*******************/ void ShortestPath_DIJ(AMGraph G, int v0) { //用Dijkstra算法求有向网G的v0顶点到其余顶点的最短路径 int v, i, w, min; int n = G.vexnum; //n为G中顶点的个数 for (v = 0; v < n; ++v) { //n个顶点依次初始化 S[v] = false; //S初始为空集 D[v] = G.arcs[v0][v]; //将v0到各个终点的最短路径长度初始化为弧上的权值 if (D[v] < MaxInt) Path[v] = v0; //如果v0和v之间有弧,则将v的前驱置为v0 else Path[v] = -1; //如果v0和v之间无弧,则将v的前驱置为-1 }//for S[v0] = true; //将v0加入S D[v0] = 0; //源点到源点的距离为0 /*―初始化结束,开始主循环,每次求得v0到某个顶点v的最短路径,将v加到S集―*/ for (i = 1; i < n; ++i) { //对其余n-1个顶点,依次进行计算 min = MaxInt; for (w = 0; w < n; ++w) if (!S[w] && D[w] < min) { //选择一条当前的最短路径,终点为v v = w; min = D[w]; }//if S[v] = true; //将v加入S for (w = 0; w < n; ++w) //更新从v0出发到集合V?S上所有顶点的最短路径长度 if (!S[w] && (D[v] + G.arcs[v][w] < D[w])) { D[w] = D[v] + G.arcs[v][w]; //更新D[w] Path[w] = v; //更改w的前驱为v }//if }//for }//ShortestPath_DIJ
弗洛伊德算法:
void ShortestPath_Floyed(AMGraph G){ //用Floyd算法求有向网G中各对顶点i和j之间的最短路径 int i , j , k ; for (i = 0; i < G.vexnum; ++i) //各对结点之间初始已知路径及距离 for(j = 0; j < G.vexnum; ++j){ D[i][j] = G.arcs[i][j]; if(D[i][j] < MaxInt && i != j) Path[i][j]=i; //如果i和j之间有弧,则将j的前驱置为i else Path [i][j] = -1; //如果i和j之间无弧,则将j的前驱置为-1 }//for for(k = 0; k < G.vexnum; ++k) for(i = 0; i < G.vexnum; ++i) for(j = 0; j < G.vexnum; ++j) if(D[i][k] + D[k][j] < D[i][j]){ //从i经k到j的一条路径更短 D[i][j] = D[i][k]+D[k][j]; //更新D[i][j] Path[i][j] = Path[k][j]; //更改j的前驱为k }//if }//ShortestPath_Floyed
我的作业:
#include <iostream> using namespace std; #define OK 1 #define MaxInt 32767 #define MVNum 100 typedef int Status; typedef char VerTexType; typedef int ArcType; int visited[MVNum] = { 0 }; typedef struct { VerTexType vexs[MVNum]; ArcType arcs[MVNum][MVNum]; int vexnum, arcnum; }AMGraph; int LocateVex(AMGraph G, VerTexType u) { int i; for (i = 0; i < G.vexnum; ++i) if (u == G.vexs[i]) return i; return -1; } void DFS_AM(AMGraph G, int v)//深度遍历 { cout << G.vexs[v]; visited[v] = 1; for (int w = 0; w < G.vexnum; ++w) if ((G.arcs[v][w] != 0) && (!visited[w])) { DFS_AM(G, w); } } void DrawLine(int n) { printf(" --+"); for (int i = 0; i < n; ++i) { printf("------+"); } printf(" "); } void Display_AM(AMGraph G) { for (int i = 0; i < G.vexnum; ++i) printf("%7c", G.vexs[i]); DrawLine(G.vexnum); for (int i = 0; i < G.vexnum; ++i) { printf(" %c|", G.vexs[i]); for (int j = 0; j < G.vexnum; ++j) { printf("%6d|", G.arcs[i][j]); } DrawLine(G.vexnum); } } /******* 普里姆算法(最小生成树) *********/ struct { VerTexType adjvex; ArcType lowcost; }closedge[MVNum]; Status CreateUDN(AMGraph &G)//构造无向网 { int i, j, k; cout << "请输入总顶点数,总边数,以空格隔开:"; cin >> G.vexnum >> G.arcnum; cout << endl; cout << "输入点的名称:"; for (i = 0; i < G.vexnum; ++i) { cin >> G.vexs[i]; } cout << endl; for (i = 0; i < G.vexnum; ++i) for (j = 0; j < G.vexnum; ++j) G.arcs[i][j] = MaxInt; for (k = 0; k < G.arcnum; ++k) { VerTexType v1, v2; ArcType w; cout << "请输入第" << (k + 1) << "条边及权值:"; cin >> v1 >> v2 >> w; i = LocateVex(G, v1); j = LocateVex(G, v2); G.arcs[i][j] = w; G.arcs[j][i] = G.arcs[i][j]; } return OK; } int Min(AMGraph G) { int i; int index = -1; int min = MaxInt; for (i = 0; i < G.vexnum; ++i) { if (min > closedge[i].lowcost && closedge[i].lowcost != 0) { min = closedge[i].lowcost; index = i; } } return index; } void MiniSpanTree_Prim(AMGraph G, VerTexType u)//最小生成树 普利姆 { int i, j, k; VerTexType u0, v0; k = LocateVex(G, u); for (j = 0; j < G.vexnum; ++j) if (j != k) closedge[j] = { u,G.arcs[k][j] }; closedge[k].lowcost = 0; for (i = 1; i < G.vexnum; ++i) { k = Min(G); u0 = closedge[k].adjvex; v0 = G.vexs[k]; cout << u0 <<"--"<< v0<<" "; closedge[k].lowcost = 0; for (j = 0; j < G.vexnum; j++) if (G.arcs[k][j] < closedge[j].lowcost) closedge[j] = { G.vexs[k],G.arcs[k][j] }; } } /**************克鲁斯卡尔算法 (最小生成树)************/ struct { VerTexType Head; VerTexType Tail; ArcType lowcost; }Edge[MVNum]; int Vexset[MVNum]; Status CreateUDN_Kruskal(AMGraph &G) { int i, j, k; cout << "请输入总顶点数,总边数,以空格隔开:"; cin >> G.vexnum >> G.arcnum; cout << endl; cout << "输入点的名称:"; for (i = 0; i < G.vexnum; ++i) { cin >> G.vexs[i]; } cout << endl; for (i = 0; i < G.vexnum; ++i) for (j = 0; j < G.vexnum; ++j) G.arcs[i][j] = MaxInt; for (k = 0; k < G.arcnum; ++k) { VerTexType v1, v2; ArcType w; cout << "请输入第" << (k + 1) << "条边及权值:"; cin >> v1 >> v2 >> w; i = LocateVex(G, v1); j = LocateVex(G, v2); G.arcs[i][j] = w; G.arcs[j][i] = G.arcs[i][j]; Edge[k].lowcost = w; Edge[k].Head = v1; Edge[k].Tail = v2; } return OK; } void Sort(AMGraph G)//冒泡排序 { int m = G.arcnum - 2; int flag = 1; while ((m > 0) && flag == 1) { flag = 0; for (int j = 0; j <= m; j++) { if (Edge[j].lowcost > Edge[j + 1].lowcost) { flag = 1; VerTexType temp_Head = Edge[j].Head; Edge[j].Head = Edge[j + 1].Head; Edge[j + 1].Head = temp_Head; VerTexType temp_Tail = Edge[j].Tail; Edge[j].Tail = Edge[j + 1].Tail; Edge[j + 1].Tail = temp_Tail; ArcType temp_lowcost = Edge[j].lowcost; Edge[j].lowcost = Edge[j + 1].lowcost; Edge[j + 1].lowcost = temp_lowcost; } } --m; } } void MiniSpanTree_Kruskal(AMGraph G) { int i, j, v1, v2, vs1, vs2; Sort(G); for (i = 0; i < G.vexnum; ++i) Vexset[i] = i; for (i = 0; i < G.arcnum; ++i) { v1 = LocateVex(G, Edge[i].Head); v2 = LocateVex(G, Edge[i].Tail); vs1 = Vexset[v1]; vs2 = Vexset[v2]; if (vs1 != vs2) { cout << Edge[i].Head << "--" << Edge[i].Tail <<" "; for (j = 0; j < G.vexnum; ++j) if (Vexset[j] == vs2) Vexset[j] = vs1; } } } /**************迪杰特斯拉算法*******************/ void ShortestPath_DIJ(AMGraph G, int v0) { //用Dijkstra算法求有向网G的v0顶点到其余顶点的最短路径 int v, i, w, min; int n = G.vexnum; //n为G中顶点的个数 for (v = 0; v < n; ++v) { //n个顶点依次初始化 S[v] = false; //S初始为空集 D[v] = G.arcs[v0][v]; //将v0到各个终点的最短路径长度初始化为弧上的权值 if (D[v] < MaxInt) Path[v] = v0; //如果v0和v之间有弧,则将v的前驱置为v0 else Path[v] = -1; //如果v0和v之间无弧,则将v的前驱置为-1 }//for S[v0] = true; //将v0加入S D[v0] = 0; //源点到源点的距离为0 /*―初始化结束,开始主循环,每次求得v0到某个顶点v的最短路径,将v加到S集―*/ for (i = 1; i < n; ++i) { //对其余n-1个顶点,依次进行计算 min = MaxInt; for (w = 0; w < n; ++w) if (!S[w] && D[w] < min) { //选择一条当前的最短路径,终点为v v = w; min = D[w]; }//if S[v] = true; //将v加入S for (w = 0; w < n; ++w) //更新从v0出发到集合V?S上所有顶点的最短路径长度 if (!S[w] && (D[v] + G.arcs[v][w] < D[w])) { D[w] = D[v] + G.arcs[v][w]; //更新D[w] Path[w] = v; //更改w的前驱为v }//if }//for }//ShortestPath_DIJ void DisplayPath(AMGraph G, int begin, int temp) { //显示最短路 if (Path[temp] != -1) { DisplayPath(G, begin, Path[temp]); cout << G.vexs[Path[temp]] << "-->"; } }
测试:
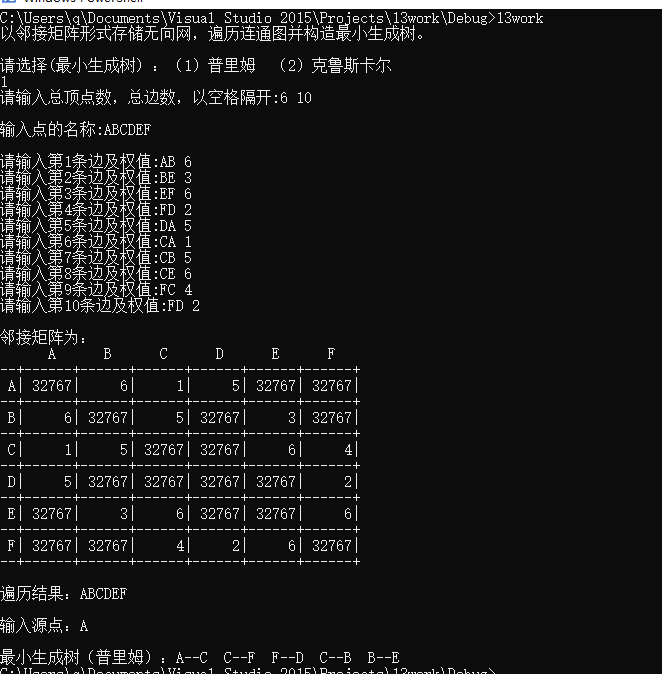
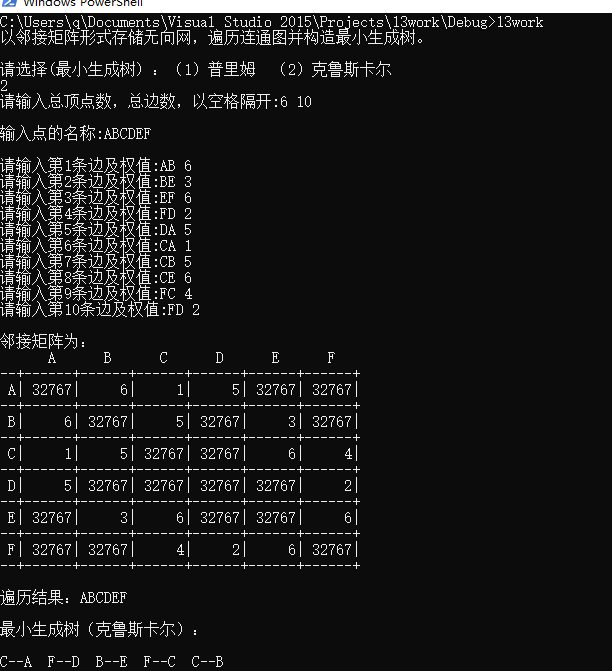
int main() { cout << "以邻接矩阵形式存储无向网,遍历连通图并构造最小生成树。" << endl; AMGraph G; cout << " 请选择(最小生成树) :(1)普里姆 (2)克鲁斯卡尔" << endl; int a; cin >> a; if (a == 1) { CreateUDN(G); cout << " 邻接矩阵为:" << endl; Display_AM(G); cout << " 遍历结果:"; DFS_AM(G, 0); cout << endl; VerTexType u; cout << " 输入源点:"; cin >> u; cout << " 最小生成树(普里姆):"; MiniSpanTree_Prim(G, u); } else if (a == 2) { CreateUDN_Kruskal(G); cout << " 邻接矩阵为:" << endl; Display_AM(G); cout << " 遍历结果:"; DFS_AM(G, 0); cout << endl; cout << " 最小生成树(克鲁斯卡尔): "; cout << endl; MiniSpanTree_Kruskal(G); } cout << endl; int num_start, num_destination; VerTexType start, destination; cout << "请依次输入起始点、终点名称:"; cin >> start >> destination; num_start = LocateVex(G, start); num_destination = LocateVex(G, destination); ShortestPath_DIJ(G, num_start); cout << endl << "最短路径为:"; DisplayPath(G, num_start, num_destination); cout << G.vexs[num_destination] << endl; return 0; }
运行结果: