什么是四轴飞行器?
通俗点说就是拥有四个独立动力旋翼的飞行器,四轴飞行器是多轴飞行器其中的一种,常见的多轴飞行器有两轴,三轴,四轴,六轴,八轴。
四轴飞行原理
为什么四轴能飞起来?没有机翼,升降舵,方向舵,他怎么控制升降/方向?
飞行器的主要飞行动作有垂直(升降)运动,俯仰运动,前后运动,横滚运动,侧向运动,偏航运动:
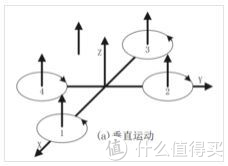
垂直(升降)运动最好理解,就是油门控制,推油门上升,拉油门降低,所有升力来自旋翼。
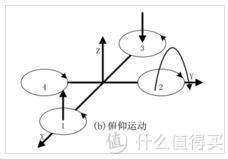
仰俯运动,在固定翼中是靠推拉升降舵来实现,四轴则是通过控制其中2个(或4个)轴线上的电机转速来实现,如下图所示:1号电机提速,3号电机降速,四轴延X轴方向仰起。并且,仰俯运动的同时,四轴也会做前后运动,四轴发生一定程度的倾斜,从而使旋翼拉力产生水平分量,因此可以实现飞行器的前飞运动。向后飞行与向前飞行正好相反而已。
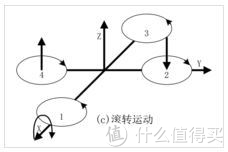
横滚运动,在固定翼中是靠控制副翼来实现,四轴则也是通过控制其中2个(或4个)轴线上的电机转速来实现,和仰俯运动控制方式一样,只是作用的电机不同而已,如下图所示:4号电机提速,2号电机降速,四轴延Y轴方向翻滚。并且,小幅度的横滚运动,会导致四轴做侧向运动。
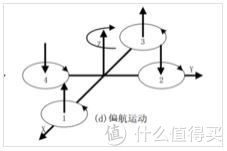
偏航运动,在固定翼中是靠控制方向舵来实现,四轴则是通过反扭力来实现。旋翼转动过程中由于空气阻力作用会形成与转动方向相反的反扭力,为了克服反扭力影响,四个旋翼,两个正转,两个反转,且对角线上的来自4各个旋翼转动方向相同;反扭力的大小与旋翼转速有关,当四个电机转速相同时,四个旋翼产生的反扭力相互平衡,四旋翼飞行器不发生转动;当四个电机转速不完全相同时,不平衡的反扭力会引起四旋翼飞行器水平转动,从而实现偏航运动,入下图所示:1,3号电机转速提高,2,4号电机转速降低,四轴就会水平旋转起来,由于总体的升力不变,所以不会导致四轴上升/下降。
 四轴飞行器的类型
四轴飞行器的类型
根据电机分布的位置,常见的四轴飞行器类型有以下几种:
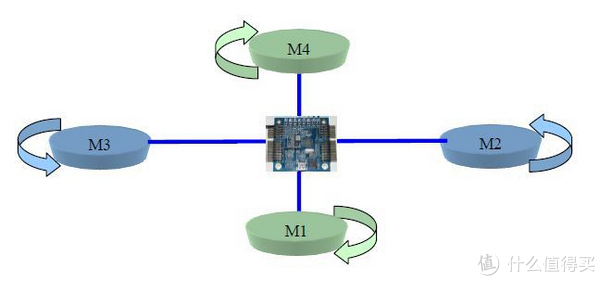
1.四轴“十”模式,四个电机呈十字分布,对头方向是M4电机方向;(M代表电机,箭头代表电机旋转方向)
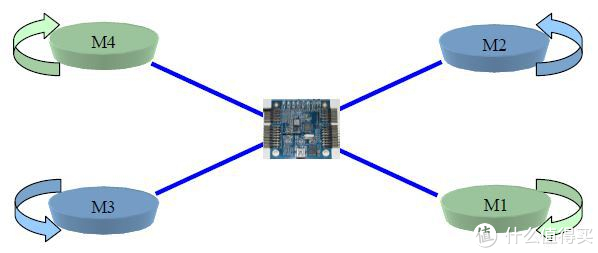
2.四轴“X”模式,四个电机呈X形分布,对头方向是M4和M2的中间点;
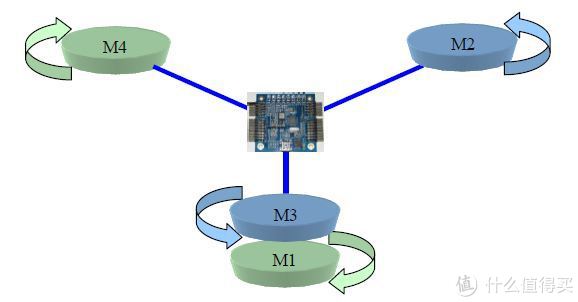
3.四轴“Y”模式,M1和M3电机正反安装在同一个中轴上,对头方向是M4和M2的中间点。
除了上面的一些四轴类型,还有可变轴的设计,通过加装伺服舵机来调节电机的轴线,使得四轴更具飞行灵活性,可以做出更多的3D动作,但是安装调试难度较大,本文就不介绍了,有兴趣的童鞋可以去搜索下。