0. 外部中断
书上的废话当然是很多的了,对于中断我想大家应该早就有一个很直观的认识,就是“设置断点,执行外部外码,然后返回断点”这样的三个过程。中断给系统提供了一个良好的响应模式。当然了,响应中断的时候记得保护现场,这是写汇编的良好习惯。
80C51一共是5个中断源,这五个中断源分别是外部中断0,1定时器中断0,1,串口中断。
1. 我们现在先来看外部中断:
一般开外部中断分为4个步骤(不用查询的方式的话):
1. 设置触发方式(IT0/IT1)
2. 开启外部中断(EX0/EX1)
3. 设定优先级(IP寄存器)
4. 开启总中断(EA)
查询方式只是多了一步看IE的值而已
代码(汇编代码)
SETB IT1 SETB EX1 SETB PX1 ;设定外部中断1为高级中断 SETB EA
(C51代码)
IT1 = 1; EX1 = 1; PX1 = 1; EA = 1;
(如果不用AJMP $那种方式等待中断,通过查询IE0/IE1的状态,我们应该这样写)
LOOP: JB IE0, EVENT_OCCUR: LJMP LOOP EVENT_OCCUR: ;这里相当于可以是中断处理程序 CLR IE0 ;记得清掉IE0的状态 LJMP LOOP
2. 外部中断相关寄存器位:
IE0/IE1和IT0/IT1在TCON寄存器(88H),而EX0/EX1,EA在IE寄存器(A8H)
IT0/IT1是设定外部中断0,1的触发方式的。比如当IT0为0时,是低电平触发,当INT0引脚(P3.2)为低电平时,IE置1,撤销的办法只有将外部输入的低电平变为高电平。当是下降沿触发时(INT0 = 1),则由硬件自动清0。
IE0/IE1是中断请求位,当有中断请求的时候,这个位就会被置1,可以通过查询的方式来确定是否有中断的响应(闲的蛋疼的时候可以尝试下,就是简单的论询方式而已,JB判断一下即可)。
注意如果设定IT0/IT1为低电平触发的时候一定要注意中断在引脚维持的时间,设置不好将引发玄学。如果引脚低电平维持时间太短,那么中断可能不会被响应,如果太长,有可能让中断处理程序执行完了都还没变回高,使得中断被一直响应。(低电平触发软件/硬件修改IE0/IE1是无效的)
(PS:当然这种情况可以引入锁存器来解决,只要锁住INT0的信号为低电平就可以了,比如书上采用了D触发器,把外部中断接入D触发器的时钟断,D触发器的输入口接地,Q端接INT0,然后随便拿一个P口置D触发器异步置位端,这样一旦有中断响应,D触发器的输出为0,然后中断处理程序给对应的异步置位端1的信号,这样就可以保证在整个中断处理程序之内INT0的引脚都是1(撤销IE),中断处理程序结束后再把异步置位端为0,以便接受其他中断)。

但是如果IT0/IT1为下降沿触发的时候就不会这样,如果处理器在两个机器周期扫描到INT0引脚的电平先后为高电平和低电平,那么就会设置中断标志位为1,直到中断被响应之前都不会被撤销,一旦中断响应后,硬件将自动将IE0/IE1置0。

外部中断优先级的优先位设置也是在IP位中的(Interrupt Priority),在普通的80C51中,只能设定两个中断优先级(当然前面我们已经说了新型的可以达到4个了),中断优先级的自然顺序是规定好了的,是按照外部中断0,定时器中断0,外部中断1,定时器中断1,串口中断的顺序来定的。(在C51里面这些interrupt分别是0-4)在80C51中,中断是可以嵌套的,也就是遵循高级中断可以打断低级中断,同级中断不可以重入这样的规则,在80C51中,中断嵌套最大层数为两层。)
3. 关于中断响应时间:
处理器收到中断请求后,下一个机器周期是否转去执行中断服务子程序,还受到以下影响:
① 若当前机器周期不是处理器正在执行的指令的最后一个机器周期,则需要等到指令执行完成。
② 若正在执行RETI指令或者是其他读写与中断有关的寄存器IE、IP的指令,则需要在执行完该指令后,再执行一条指令,然后再转入中断服务子程序。
③ 中断返回后至少执行一条指令后才能响应新的中断。
中断申请到执行第一条中断服务程序的最短时间是3个机器周期(优先权扫描1机器周期,LCALL指令2个机器周期)。若遇到不是执行指令的最后一个机器周期和正在执行RET、RETI或任何访问IE或IP寄存器指令时,则需要最长的等待时间不超过8个机器周期(3个最短周期,和5个最长等待周期。)
1. 定时器/计数器中断
定时器和计数器中断也是掌握怎么开的步骤就可以了,中断处理程序打的写法除了地址不一样其他没什么不一样。
开定时器和计数器要有6个步骤:
1. 设定TMOD(确定计数还是计时,确定什么方式)
2. 设定定时or计数时间
3. 打开ET0/ET1
4. 打开TR0/TR1
5. 设定优先级(IP寄存器)
6. 开启总中断(EA)
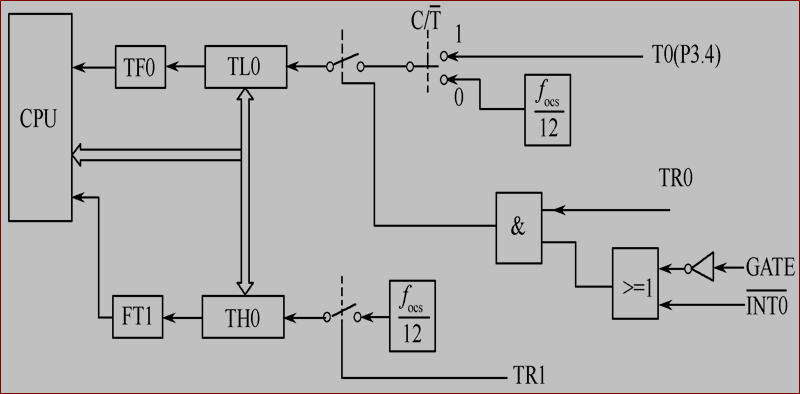
定时器/计数器中断在但单片机上的中断的引脚是P3.4(T0),P3.5(T1),当选定内部时钟时,对应的机器周期脉冲为f0sc/12(即对应晶振的12分频)。
当定时器/计数器作为计数器时,其最大频率是晶振的24分频(Fosc / 24)。(因为采集一个下降沿需要两个机器周期)。
当定时器/计数器作为定时器时,其最大频率是晶振的12分频(Fosc / 12)。周期T = 12*(1/f)
1. 定时器/计数器相关寄存器:




TH0/TL0,TH1/TL1这四个寄存器都是不能位寻址的,代表的是定时器/计数器0,定时器/计数器1的当前值,当我们开启定时器/计数器时前要设定他们的初值。
TCON这个寄存器是上面提过的,现在我们来看属于定时器/计数器的那一部分,TR1/TR0是开启定时器/计数器的标志位,TF1/TF0是标识计数器/定时器满的标志位(当TH0/TL0的内容达到2^x - 1的时候(x代表的x位的计数器/定时器)),这个时候TF1/TF0就置1(和外部中断一样,我们也可以用查询这个位的状态方式来代替中断处理程序的方式)。
IE位的ET1和ET0是允许定时/计数器标志位,不要和TR0/TR1搞混了。
TMOD是一个不能位寻址的寄存器,只能整体操作。TMOD分为两个部分,其中高四位是对应设置T1,低四位对应设置的是T0。
GATE位是计数器门控制位:当GATE = 0时,只要启动TR0/TR1定时器就开始工作。当GATE = 1时,还需要一个外加条件即INT1/INT0为0时才会启动计数。
C/T位:当C/T = 0,为定时器,当C/T = 1,为计数器。
M1M0位:设定定时器/计数器打的工作方式(一共四种)
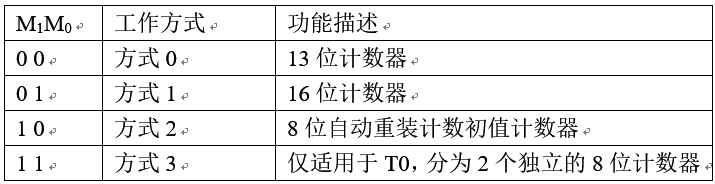
设定了工作方式后需要做的就是根据工作方式来设定T0/T1的初值了,只要记住这个公式就可以了:
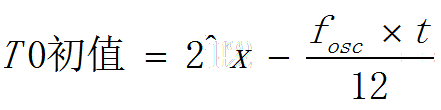
其中X的值取决于这是多少位的计数器or定时器,比如如果设定工作方式0,那么x应该为13
说下几个比较值得注意的坑:
1. 对于方式0,设定其初值的时候一定要记得其13位数的安排是TH0/TH1 8位,TL0/TL1 5位(而不是反过来)。
比如,80C51的工作时钟为6MHZ,定时时间为800us,使用定时器0工作方式0,如何设定初值
所以TH0的值是0F3H,TL0的值是10H(而不是TH0 = 1EH,TL0 = 70H)
2. 除了方式2可以自动重装外(如果采用了定时器2的工作方式,对应定时器/计数器TH和TL一定要设定一样),其他方式当中断响应以后一定要给对应定时器/计数器TH和TL设定新的值,不然不会响应下一次中断。
3. 方式3是一个比较特殊的定时方式,要注意只有T0才能设定为方式3,T1设定为方式3的时候会停止计数。
我们可以看到如果设定为方式3的时候相当于把TH0和TL0拆成两个单独的8位计数器,其中TL0占用TR0和TF0,TH0占用TR1和TR0,TL0作为一个单独的8位计数器/定时器和其他定时器/计数器没有区别(只是是8位而已)。但是TH0不一样,由于它没有C/T位和GATE位控制,所以它只能作为一个定时器。
在T0工作在方式3的时候,T1可以工作在方式0,1,2(由于TR1和TF1被TH0占用,所以想要停止T1工作只能把它的工作方式设定为工作方式3,同时也不能查询TF1的状态来看触发次数,只能直接查看TH1和TL1来看)。一般当我们设置T0为方式3时,T1会设置为方式2(自动填装),以方便串口的发送。
那怎么打开T?比如我现在要打开定时器/计数器0,以工作方式1工作,定时为10ms(计算可知T0初值为0EC78H)
(汇编代码)
MOV TMOD, #00000001B MOV TH0, #0ECH MOV TL0, #78H SETB ET0 SETB TR0 SETB EA
(C51)
TMOD = 0x01; TH0 = 0xEC; TL0 = 0x78; ET0 = 1; TR0 = 1; EA = 1;
2. 一些例子
1. 编程实现INT1为高级中断,下降沿触发,T0设为低优先级中断,串行口设定为高优先级中断,其他中断禁止
(汇编)
ORG 0000H LJMP MAIN ORG 0100H MAIN: MOV IP, #014H ; PS:PT1:PX1:PT0:PX0 = 10100(INT1高级中断,串口高级中断) SETB IT1 ;外部中断下降沿触发 SETB EX1 ;允许外部中断1 SETB ET1 ;允许定时器中断1 SETB ES ;打开串口中断 SETB EA END ;写汇编程序千万不要忘记写END
(C51)
int main() { IP = 0x14; IT1 = 1; EX1 = 1; ET1 = 1; ES = 1; EA = 1; return 0; }
2. 80C51单片机晶振频率为6MHZ,要求定时为10ms,定时器0工作在方式0,1,2时,定时器初值应该设置为多少?要求用16进制表示:
解:方式0:2^13 - (6*10^6 * 10 *10^-3 )/12 = 3192 -> TH0(063H) TL0(018H)(注意TH0放高8位,TL0放低5位)。方式1:2^16 - (6*10^6 * 10 *10^-3 )/12 = 60536 -> TH0(0ECH) TL0(078H)方式2:2^8 - (6*10^6 * 10 *10^-3 )/12 < 0 (溢出不能设置)
3. 用定时器/计数器T0产生时钟,使连接P1口的8盏灯循环点亮(1s一次),用中断方式编写
(这一题定时为1s太长了,需要我们拓展,我们可以定时个10ms然后定100次就可以了,用循环队列的思想即可完成任务)
ORG 0000H LJMP MAIN ORG 000BH LJMP EVENT_OCCUR ORG 0100H MAIN: MOV R0, #00H ;设定队列初值0 MOV P1, #01H MOV TMOD, #00000001B MOV TH0, #0ECH MOV TL0, #78H SETB ET0 SETB TR0 SETB EA AJMP $ EVENT_OCCUR: CLR EA PUSH ACC ;保护现场,虽然在这一题没必要 INC R0 CJNE R0, #100, NEXT_EVENT RL A MOV P1, A MOV R0, #00H NEXT_EVENT: MOV TH0, #0ECH ;一定要记得重设初值 MOV TL0, #78H POP ACC ;恢复现场 RETI END
4. 测手速:统计两秒内按下按钮的次数,显示在数码管上,并且2S后让数码管清0
(汇编代码)
_CODE_SEGMENT: ORG 0000H LJMP START ORG 000BH LJMP BUTTON_HASED_PUSHED ORG 001BH LJMP EVENTLOOP_OCCUR ORG 0100H START: ;crystal oscillator frequency is 12MHZ ;Register 0 is uesd to log the number pushing actions MOV R0,#00H ;register 1 is uesd to log the microsecond event times MOV R1,#00H MOV TH0,#0FFH MOV TL0,#0FFH MOV TH1,#0D8H MOV TL1,#0F0H MOV TMOD,#00010101B ;we must make time interrupt 1 is the advance interrupt MOV IP,#02H SETB ET0 SETB TR0 SETB ET1 SETB TR1 SETB EA LCALL DISPLAY_DIGITAL_NUM AJMP $ BUTTON_HASED_PUSHED: INC R0 UPDATE_DIGITL_NUM: LCALL DISPLAY_DIGITAL_NUM MOV TH0,#0FFH MOV TL0,#0FFH RETI EVENTLOOP_OCCUR: PUSH ACC INC R1 CJNE R1,#200,NEXT_EVENT MOV R0,#00H LCALL DISPLAY_DIGITAL_NUM MOV R1,#00H NEXT_EVENT: MOV TH1,#0D8H MOV TL1,#0F0H POP ACC RETI DISPLAY_DIGITAL_NUM: CLR EA PUSH ACC MOV A, R0 MOV DPTR, #DIGITAL_NUM MOVC A, @A + DPTR MOV P2, A POP ACC SETB EA RET _DATA_SEGMENT: DIGITAL_NUM: DB 0C0H, 0F9H, 0A4H,0B0H,99H,92H,82H,0F8H,00H,90H DB 88H, 83H, 0C6H, 0A1H, 86H, 8EH END
(C51代码)
#include<reg51.h> #define FinalOuccr 200 unsigned char const digitalNumsSet[] = {0xC0, 0xF9, 0xA4, 0xB0, 0x99, 0x92, 0x82, 0xF8, 0x00, 0x90, 0x88, 0x83, 0xC6, 0xA1, 0x86, 0x8E}; enum StarterTime{ TH0_Start = 0xFF, TL0_Start = 0xFF, TH1_Start = 0xD8, TL1_Start = 0xF0}; //----------------------------------------------------- void updateDigitalNumber(unsigned char const digitalNum); static int eventOccurTimes = 0, BtnPushedTimes = 0; void ButtonPushed()interrupt 1 using 0//中断1(定时器0中断),使用寄存器组0 { BtnPushedTimes++; updateDigitalNumber(digitalNumsSet[BtnPushedTimes]); TH0 = TH0_Start; TL0 = TL0_Start; } void EventOccur()interrupt 3 using 1//中断3(定时器1中断),使用寄存器组1 { eventOccurTimes++; if(eventOccurTimes == FinalOuccr) { BtnPushedTimes = 0; updateDigitalNumber(digitalNumsSet[BtnPushedTimes]); eventOccurTimes = 0; } TH1 = TH1_Start; TL1 = TL1_Start; } int main() { TH0 = TH0_Start; TL0 = TL0_Start; TH1 = TH1_Start; TL1 = TL1_Start; TMOD = 0x15; TCON = 0x50; IP = 0X02; ET0 = 1; ET1 = 1; EA = 1; while(1); return 0; } void updateDigitalNumber(unsigned char const digitalNum) { P2 = digitalNum; }
仿真以及代码下载:http://pan.baidu.com/s/1gfsTeoF