第一章 介绍
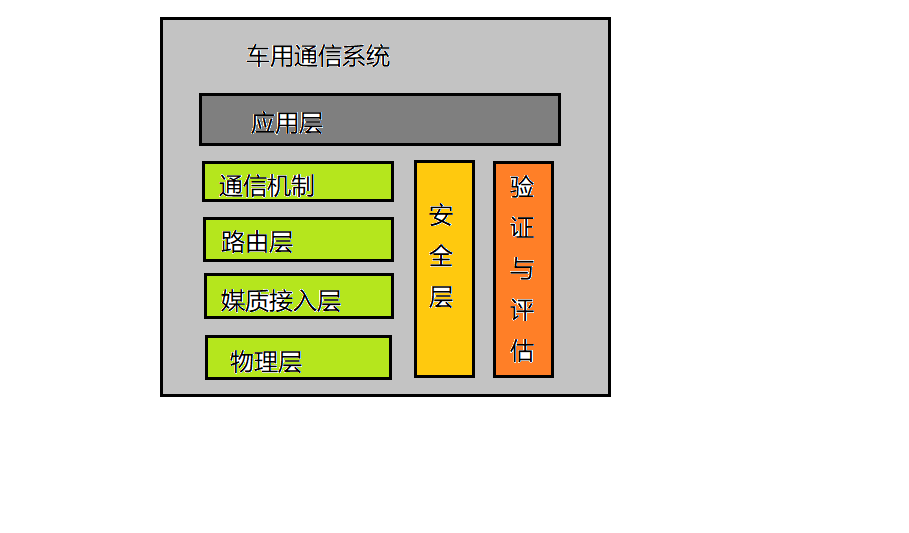
第一章主要讲述这本书的整体框架,回答了为什么引入车用通信并提出了车用通信的体系架构。
第二章 车用通信应用
应用分为三个顶层领域:安全、资源效率、信息娱乐和高级驾驶人辅助系统。
这一章节首先总述车用通信应用的三个领域,然后分别以具体实例阐述这三个领域。
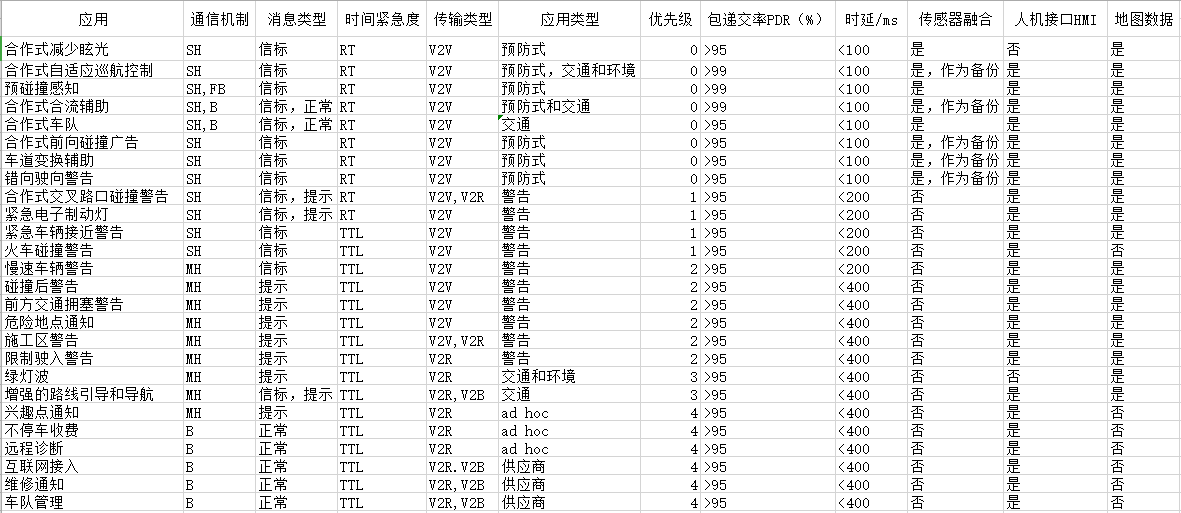
缩写:B——双向;FB——快速双向;SH——基于位置的单跳;MH——基于位置的多跳;
RT——实时;TTL——有效时间(时间约束);
优先级:0最高,4最低
HMI——人机交互(听觉、视觉、触觉)
正常——双向通信交换信息
第三章 通信机制
机制的划分:
可以按照技术的要求划分(如发送机制:双向的和以位置为基础的);也可以按照应用类型划分(如发送类型:车内、车车之间、车路之间、车与后台之间)。
发送类型:①车内通信:LIN网络(Local Interconnect Network,本地互联网络)低成本、短距、低速;适用于控制座位或顶棚的简单应用。
CAN网络(Controller Area Network,控制器局域网络)快速、可靠;适用于传感器和执行器之间的通信,支持严格或非严格应用, 如主动安全应用(ABS、ESP、停车辅助)。
②车与后台通信:不适用主动安全应用,可用于信息娱乐(即互联网接入)和特殊的交通应用(增强的路线指导和导航)。
③路测与后台之间的通信:可以使用无线路测基础设施,也可以使用有线网络。
④卫星与车辆通信:即车辆定位服务
⑤车车通信和车与路侧通信在后续详细介绍。
3.1 双向通信机制
双向通信即单播通信
四个步骤:①发现阶段,一辆车搜索周边节点(另一辆车或路侧单元)
②连接阶段,一辆车与另一辆车或路侧单元初始连接。另一辆车或路侧单元允许或拒绝连接
③数据发送阶段,通信双方保持开放的连接进行信息交互
④结束阶段,其中一方决定结束连接并且通信双方停止通信
PS:由于双向通信交换以及在消息发送后等要等待反馈,导致了时延的产生。
3.2 基于位置的单跳通信机制
优点:将消息快速传递给多个车辆
缺点:只能单向发送,不能确认对方是否成功接收
3.3基于位置的多跳通信机制
第四章 车联网中的信息
1.公共信息:
- 带时间戳的msgID
- nodeID,表明一个唯一的ID,可能是一个IP
- ownNodeType 表明是车辆或者路侧单元
2.永久信息 :
- 遥测的数据
- 位置可信度
- 车辆内部参数
3.警告类特殊信息
- 湿滑的路段区域
- 风向和速度方向
- 一些其他的交通相关的通知,例如危险或施工路段
- 信息的优先级
- 信息的生存期
- 发送者设置消息的可靠度
第五章 路由
路由是指将数据分组从源节点移至目的节点,并在必要时分配一个到目的节点的路径。
5.1 多跳路由协议
5.1.1 ad hoc 按需距离矢量路由(ADOV)
ADOV既支持单播通信以支持多播通信。
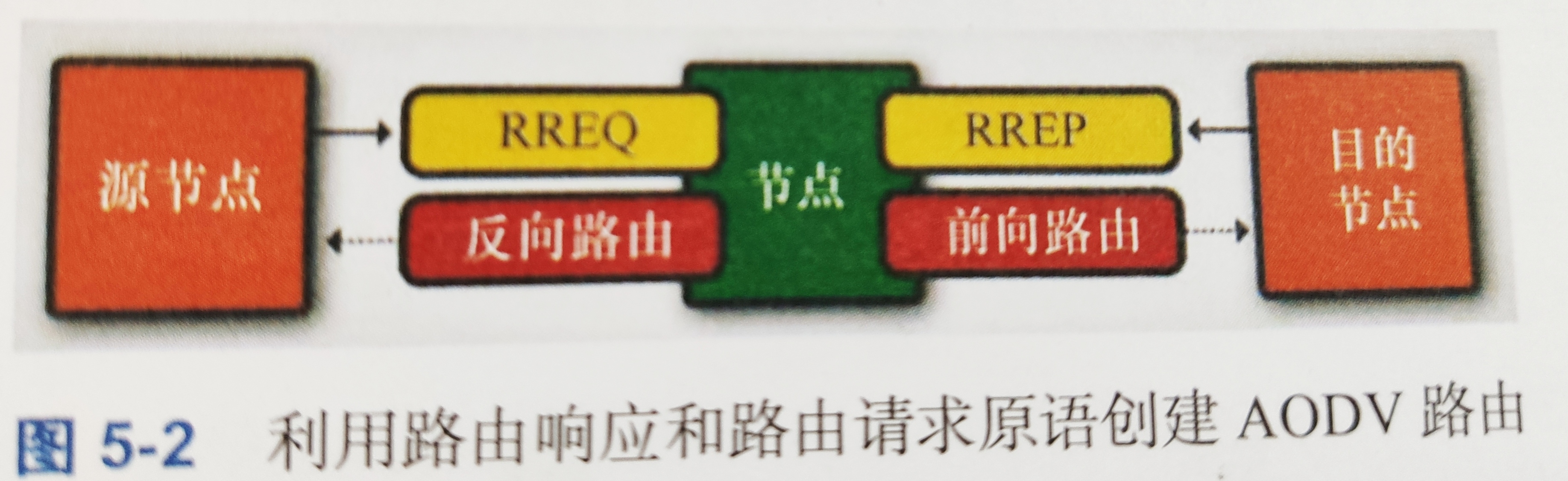
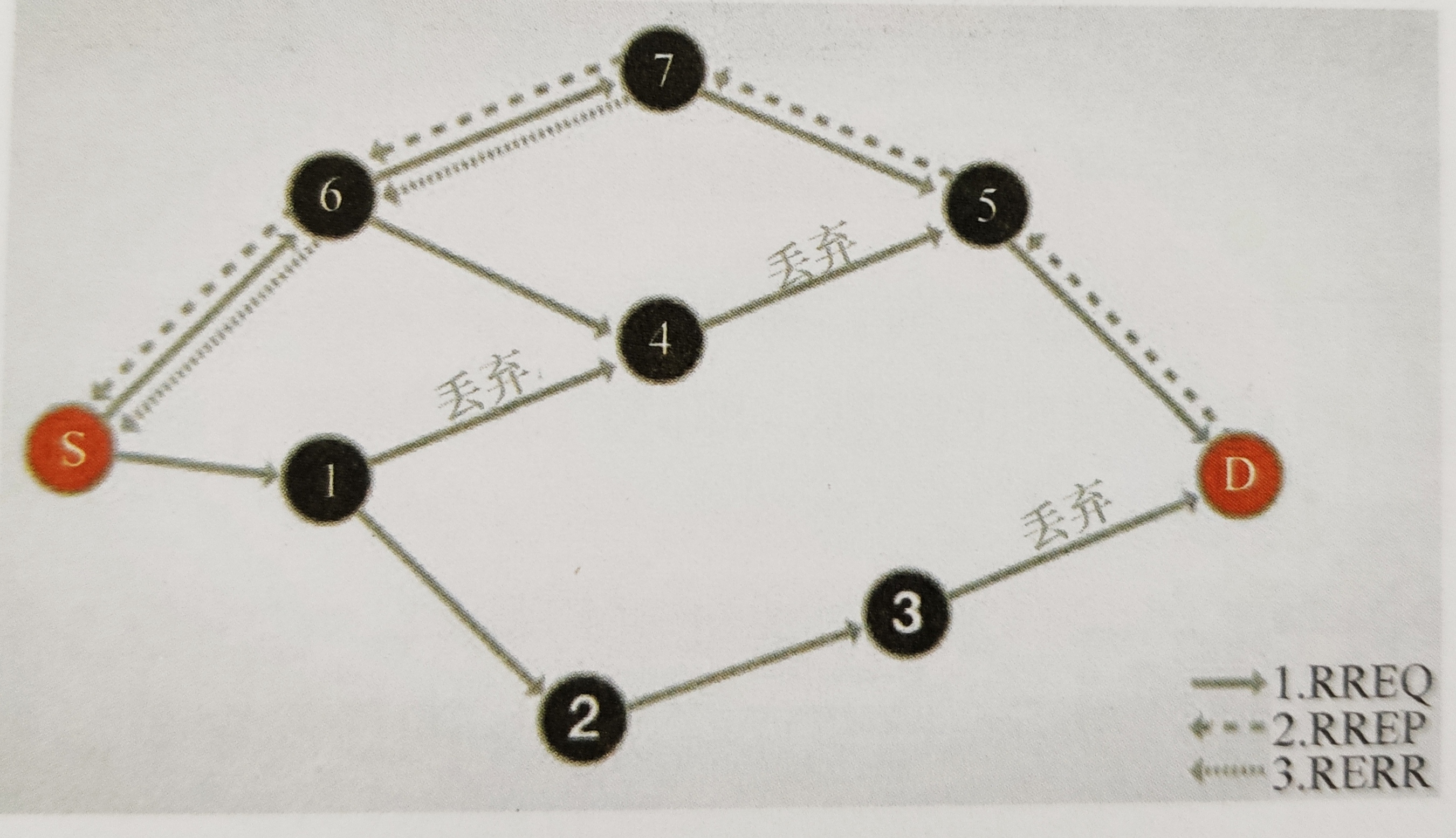
PS:RREQ-路由请求;RREP-路由响应;RERR-报错消息。
特点:能够避免路由自环,便于扩展至大量节点的场景。
缺点:较大时延、较高的开销、较低的包递交率(PDR)。该算法并不是基于位置的,不能提供很好的容错。
5.1.2 网格位置服务(GLS)
基本思想:每个节点只向所有节点的一个较小子集发送其当前位置。基本理念是在网格结构之上以四叉树的形式创建数据库,四叉树是一种树形数据结构,其内部节点最多有四个节点。

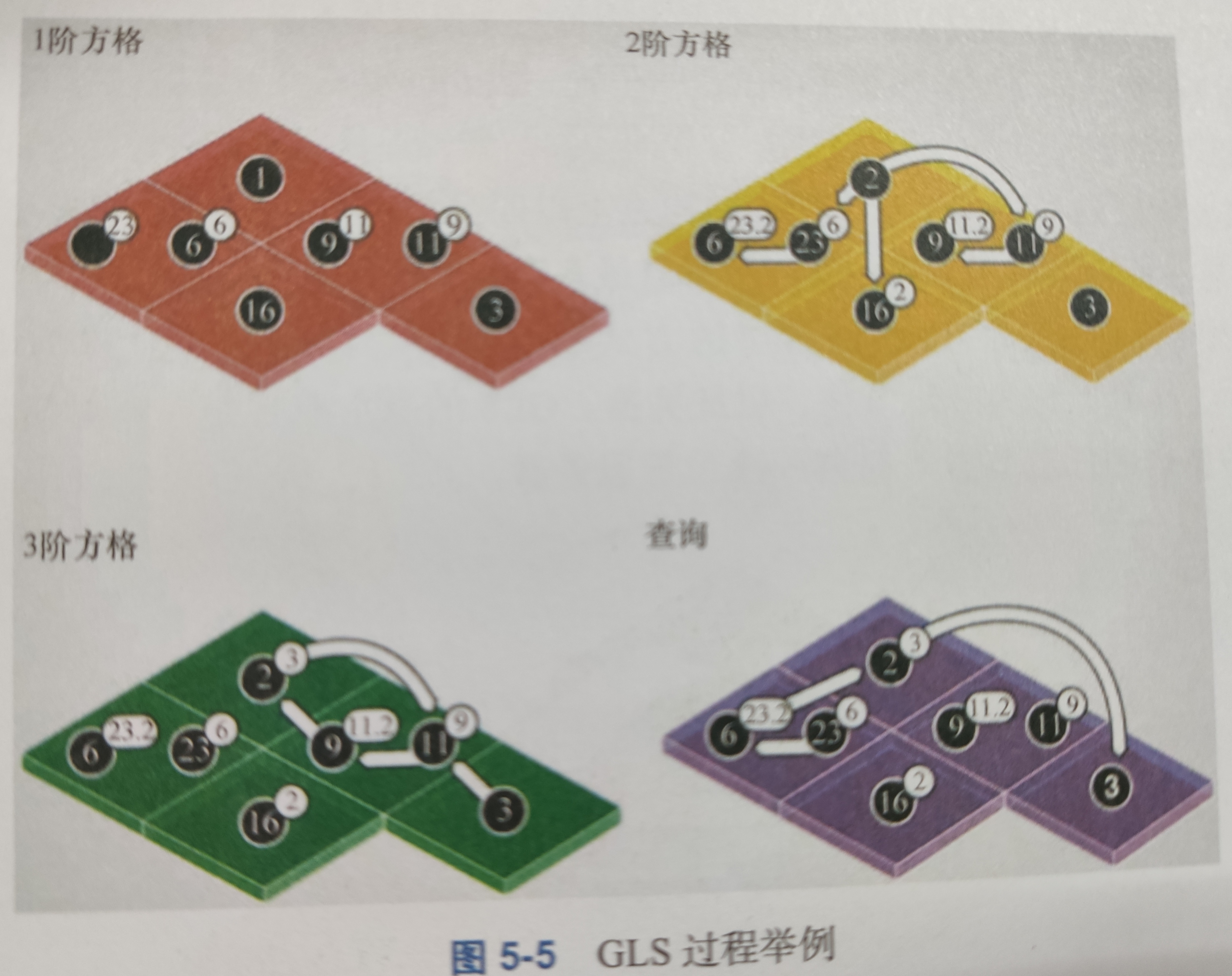
GLS在移动环境下会导致较大的时延(比AODV低)、较高的开销、较低的PDR。时延和开销会随着节点密度的增加上升。该算法提供容错:网格中存在多个位置服务器保证了即使单一位置服务器出错,也不会导致节点不可达。它利用地理位置分发的方法消除了AODV中不可控的泛洪问题(冗余传输)。
5.1.3 贪婪周边无状态路由(GPSR)
GPSR算法包含两个转发分组的方法:一旦可能就会采用的贪婪转发和在贪婪转发失效区域使用的周边转发。
该算法提供了较佳的PDR性能,但在移动环境下会下降。且它是基于位置的,可容错的,且采用了预防式方法,消除了不受控的泛洪问题。
5.1.4 地理源路由(GSR)
GSR是一种考虑了区域地图(需要GPS导航系统)的基于位置的路由方法,从而消除了GPSR在城市场景下的缺点(分组丢失)。为确定待通信节点的当前位置,采用了被动式位置服务(RLS,Reactive Location Service)。
RLS是一个路由发现过程,采用按需的方式获取位置信息。发送节点利用位置查询分组和位置响应分组可以计算出到目的节点的基于环境地图的路径。
GSP的一个缺点是要求有足够数目的车辆以保证两个通信节点之间的连通性。若车辆不够则引入基础设施。
5.1.5 基于竞争的转发(CBF,Contention-Based Fowarding)
CBF是一种基于位置的单播转发机制,该机制不利用邻节点信息。
工作原理:
转发车辆将分组广播至所有邻节点,
选择一个最佳节点转发分组,
为避免包重复,该最佳节点将抑制其他节点转发。
CBF技术是基于计时器的,这意味着分组不会被节点直接转发,而是等待一定时间周期后再发送。
5.1.6 Octopus(八爪鱼)
Octopus 将网络空间分成水平带和垂直带,同一带内的节点存储彼此的位置信息。其位置更新技术称为同步聚合。
Octopus 路由专为节点频繁进出的高移动性网络所设计,特别适用于车用通信。
该路由有三项服务组成:①位置更新②位置发现③位置转发
5.1.7 高级贪婪转发(AGF,Advanced Greedy Fowarding)
AGF进一步提升了GPSR在VANET中的性能。它是一种基于诸如GPSR等常规转发协议的增强技术,可应用与任何基于泛洪或贪婪技巧的协议。
5.1.8 首选分组广播(PGB,Preferred Group Broadcasting)
PGB是构建于现有常规转发协议如AODV基础上的路由技术,它通过移动冗余广播降低了控制消息开销,同时也增强了提供自动纠错功能的路由性能,这可以提高在高移动性ad hoc网络中更高的稳定性,而稳定性是车用通信的关键要素。
PGB解决了以下问题:
两跳之间距离过短(路径上跳数过多)
两跳之间距离过长(连接质量较差,连接可能中断)
对源节点和目标节点的网络分配矢量进行调整以规避干扰
5.2 安全多跳路由
5.2.1 ad hoc网路认证路由(ARAN)
ARAN与AODV类似,但使用了预设的机密证书以提供消息完整性和不可抵赖性。
ARAN的原理:使用基于公钥机制的可信证书服务器。每个节点都从服务器上获取一个证书并向其他节点提供自身认证。该证书包含了当前节点的IP地址、公钥以及证书创建和过期时间。
ARAN阻止了路由欺诈、消息篡改(如改变TTL值)和虚假路由请求(利用随机数和时间戳)。与AODV相比,ARAN虽然提高了安全性,但综合性能较差。主要原因是ARAN恶化了AODV自身存在的问题,并且对每个分组进行数字签名也增加了打包和处理的开销。
5.2.2 安全ad hoc按需矢量(SAODV,Secure ad hoc on Demand Vector)
与ARAN类似,SAODV的主要目标是AODV路由信息的完整性保护、认证和不可抵赖性。安全机制使用了数字签名和哈希链,数字签名用于消息中不可变部分的认证,而哈希链主要解决消息中可变信息的认证(跳数)。
5.2.3 安全链路状态路由协议(SLSP,Secure Link State Routing Protocal)
5.2.4 安全位置辅助ad hoc 路由(SPAAR,Secure Position Aided ad hoc Routing)
第六章 车用通信媒质接入
媒质接入控制层(MAC)协议的设计目标:获得较高的接收可靠性和较低的时延。
关键因子:每个发送和接收到的分组的时间戳
时间同步方法:①基于GPS的方法:使用全球知名的来自卫星的时间信息
②无中心方法:使用各个独立节点间的互调
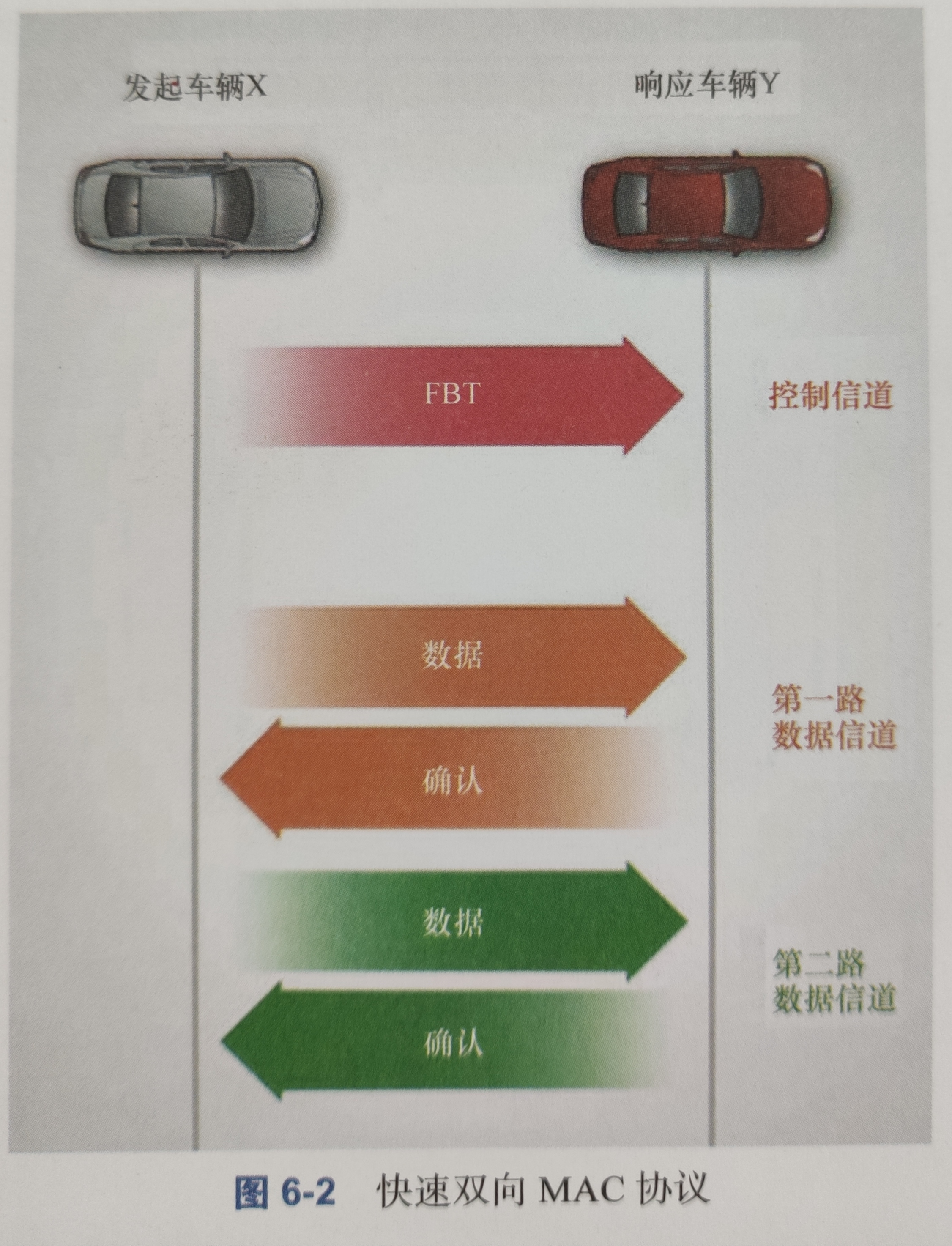
6.2 支持双向通信的MAC协议

RTS:Request-to-Send
CTS:Clear-to-Send
RTS-CTS握手的目标:通知发送端和接收端的邻节点,同时避免在接收端准备好之前发送数据。这即是带碰撞避免的载波侦听多路接入机制(CSMA/CA,Carrier Sense Multiple Access with Collision Avoidance)。
应用于诸如供应商业务、ad hoc业务等非关键场景
为了提供安全应用的快速连接,快速双向MAC协议消除了RTS/CTS,因而控制信道只包含了一种FBT(Fast Bidirectional Transmit),适用于突发事故。
6.3 基于位置的通信机制
适用于:警告和永久信标
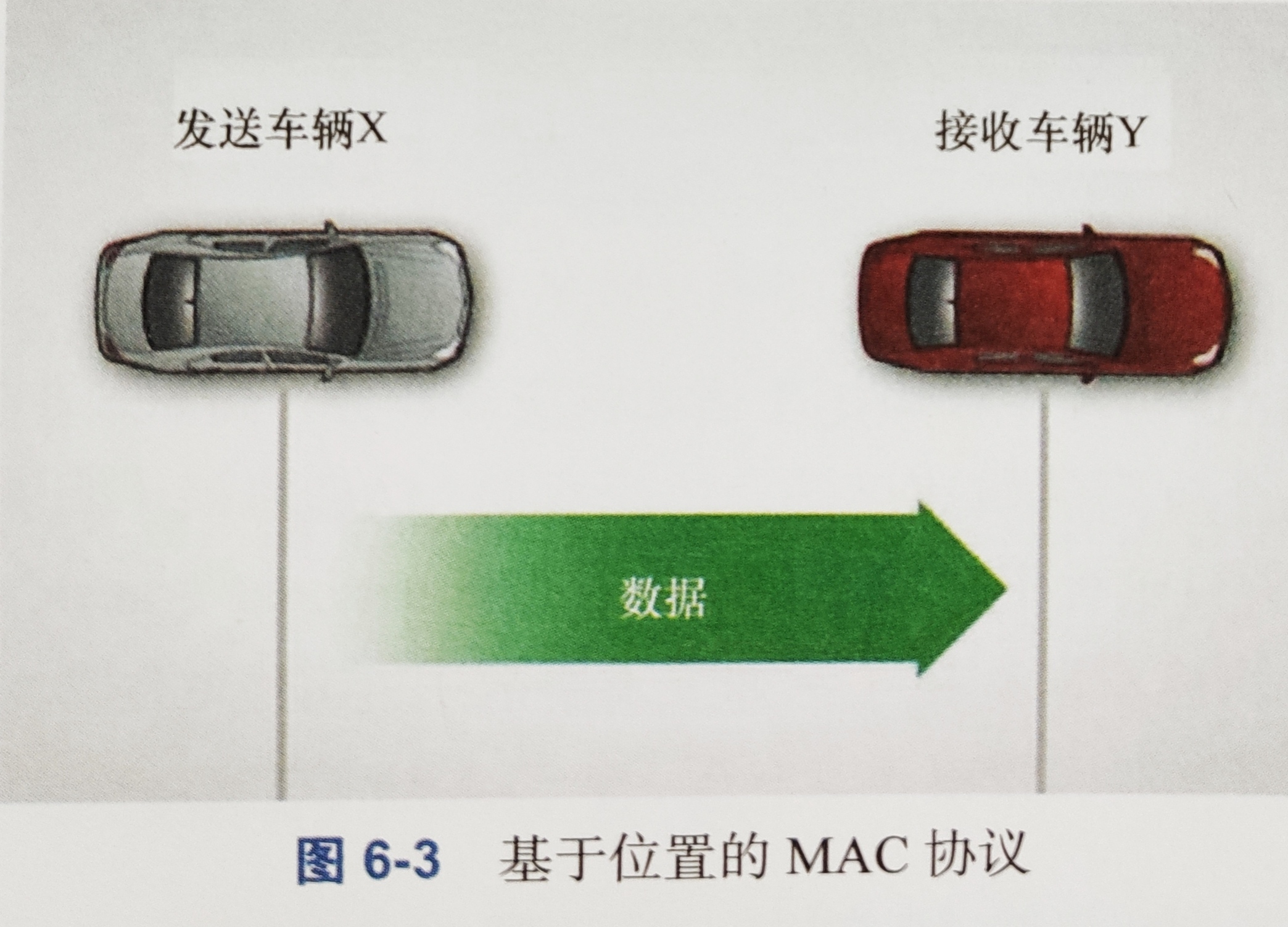
在车联网中,由于多个移动节点共享同一媒介,接入到公共信道时必须采用分布式的方式,并考虑移动性、隐藏终端和暴露终端等问题。
第7章 物理层技术
DSRC的物理层采用了正交频分复用(OFDM,orthogonal frequency division multiplex)调制方案进行数据复用,该技术的工作原理是将无线信号分割成更小的子信号,这些子载波在频率上相互交叠,但在设计上保证了彼此间不互相干扰:子载波彼此正交并采用快速傅里叶变换(FFT,Fast Fourier Transform)算法进行分离。
第八章 安全
车联网安全的约束:可扩展性(车辆数增加,需要恰当的网络管理机制)、移动性(高移速场景)、低复杂度、低成本
安全机制:安全架构
保密通信
隐私保护
可信数据
可信系统