---恢复内容开始---
二分图
如果一张无向图的N个结点(N>=2)可以分成A,B两个非空集合,其中A∩B为空,并且在同一集合中的点之间没有边相连,那么就称这张图为二分图。A,B被称为二分图的左部和右部。
二分图的判定
定理:一张无向图是二分图当且仅当图中不存在奇环(长度为奇数的环)。
依据这个定理,我们可以用染色法进行二分图的判定。大致的思想是,我们对所有的点进行黑白染色,使之满足存在边相连的两个点的颜色不相同,依照这样的方法,如果可以把所有的点都染色,那么这张图就一定是二分图,否则这张图就不是二分图。该过程可以基于遍历算法,访问每一个已经确定颜色的点,规定下一次访问的点的颜色如果存在冲突则染色失败,该图不是无向图。
二分图的最大匹配
一组匹配指的是”任意两条边都没有公共端点“,而最大匹配指的是一组匹配中存在的边数最多。
对于一组匹配S(S是一个边集),属于S的边被称为”匹配边“,不属于S的边称为”非匹配边“。匹配边的端点称为”匹配点“,其他的结点被称为”非匹配结点“。
求最大匹配的过程实际上是一个绿与被绿的过程。
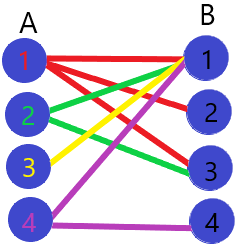
对于上图所示的例子,我们依次枚举A组的所有点:
对于A1,我们先让他匹配到B1;
然后我们考虑A2,A2也想要匹配B1,我们看B1现在的匹配点A1,发现A1还可以匹配B2,所以我们让A1匹配B2,A2匹配B1;
接着考虑A3,A3同样想匹配B1,此时B1被A2匹配这,所以我们来看A2,发现A2被还可以去匹配B3,所以我们让A1匹配B2,A2匹配B3,A3匹配B1;
最后我们来考虑A4,A4依旧想要匹配B1,而此时的匹配者A3除了B1外没有办法和其他的点匹配,所以A3不会放弃B1,他会让A4去重新寻找匹配点,那么A4就只能退而求其次,以B4作为匹配点;
所以A1匹配B2,A2匹配B3,A3匹配B1,A4匹配B4,最大匹配就为4.
由上面的算法,我们可以发现最大匹配的思想其实是一个贪心的思想,对于一个A组的点,我们依次考虑他的所有理想匹配点(可以直接到达的点),如果存在一个B组点不属于匹配点集或者可以从匹配点点集中剔除,那么我们就把这个点加入到匹配点集。其中对于如何把一个B组点从匹配点集中剔除,我们可以考略把之前与这个点匹配的A组匹配点给进行二次匹配。
用通俗的话来说,如果一个A组的点Ap想要去匹配一个B组的点,那么他有两种选择,一种是去绿一个已经匹配的点Ax,这种行为是存在风险的,如果这个被绿的已匹配点Ax有且只有当前这一种选择时(即他们俩都想匹配的By),那么这个Ap点就匹配失败了;另一种时去找一个没有形成匹配的点匹配。另外我们发现,在可以进行第一种操作的时候,先进行第一种操作失败后再选择第二种操作会更优(不存在增广路)。
模板:洛谷P3386
#include<bits/stdc++.h> using namespace std; const int MAX = 1005; unsigned int Map[MAX][MAX], used[MAX]; int match[MAX]; int n, m, e; bool Dfs(int u) { for(int v = 1; v <= m; ++ v) if(Map[u][v] && !used[v]) { used[v] = 1; if(!match[v] || Dfs(match[v])) { match[v] = u; return true; } } return false; } int main() { // freopen("test1.in", "r", stdin); int x, y; scanf("%d%d%d", &n, &m, &e); for(int i = 1; i <= e; ++ i) { scanf("%d%d", &x, &y); Map[x][y] = 1; } int ans = 0; for(int i = 1; i <= n; ++ i) { memset(used, 0, sizeof(used)); if(Dfs(i)) ans ++; } printf("%d ", ans); }
二分图的最小点覆盖
给定一张二分图,求出一个最小点集S,使得图中的任意一条边都至少有一个属于S的端点,这个问题被称为是二分图的最小点覆盖。
定理:二分图的最小点覆盖包含的点数等于二分图的最大匹配包含的边数。
二分图的的最大独立集
给定一张无向图G=(V,E),满足下列条件的点集S被称为图的独立集:
- S是V的子集
- 任意的x,y属于S都不存在x到y直接相连的边
定理:设G是有n个结点的二分图,G的最大独立集的大小等于n减去最大匹配数。
无向图G 的最大团等于其补图的最大独立集。